

Chinese Journal of Information Fusion | Volume 1, Issue 3: 175-182, 2024 | DOI: 10.62762/CJIF.2024.841250
Abstract
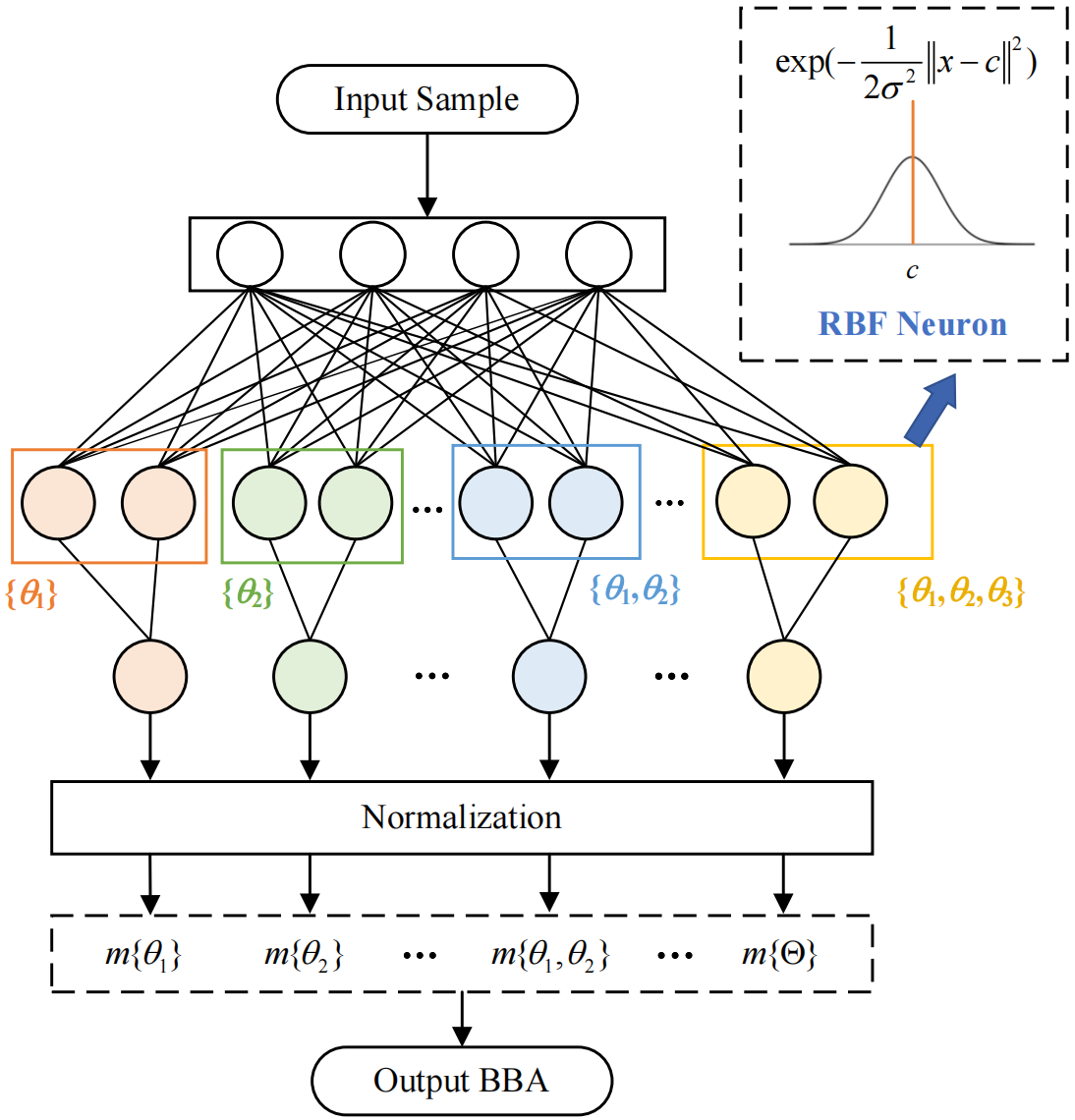
In Dempster-Shafer evidence theory (DST), the determination of basic belief assignment (BBA) is an important yet challenging issue before the evidence fusion. The rational mass determination of compound focal elements is crucial for fully taking advantage of DST, i.e., the ability to represent the ambiguity. In this paper, for the compound focal elements, we select and construct the compound-class samples with ambiguous class membership. Then, we use these samples to construct an end-to-end model called Evidential Radial Basis Function Network (E-RBFN), with the input as the sample and the output as the corresponding BBA. The E-RBFN can directly determine the mass values for all focal elemen... More >
Graphical Abstract