Open Access
|
Research Article
| 22 April 2026
| Cited:
 1
1
Advanced Barrier Function-Based Robust Prescribed Performance Control with Actuator Fault
Aerospace Engineering Communications | Volume 1, Issue 2: 68-80, 2026 | DOI: 10.62762/AEC.2026.303859
Abstract
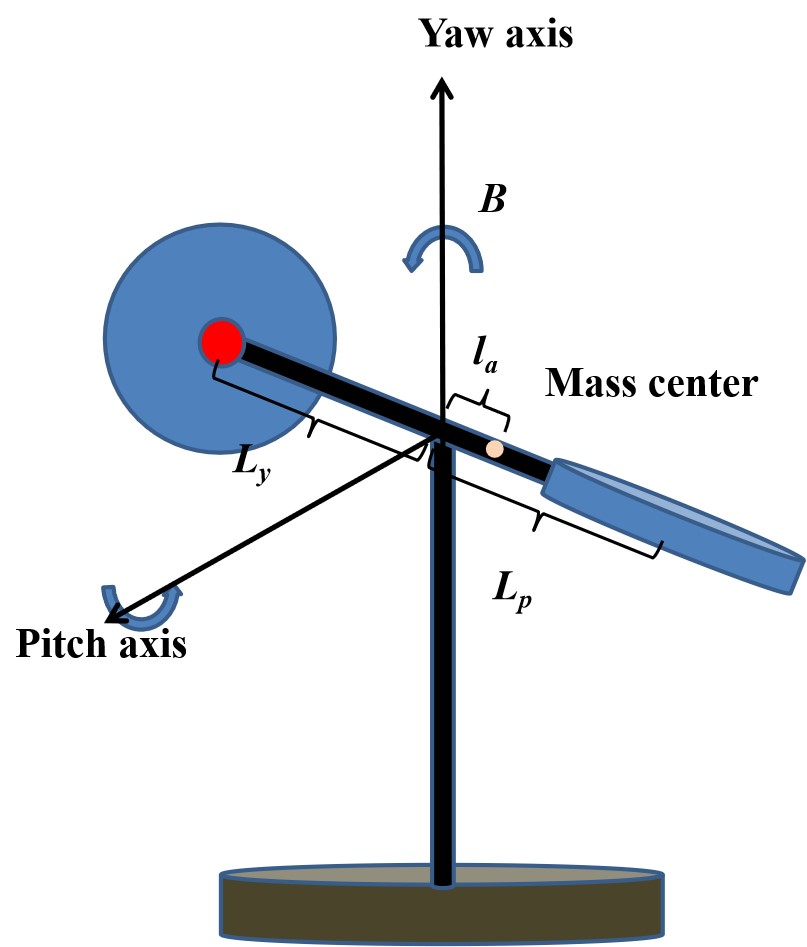
This paper investigates prescribed performance control (PPC) using an advanced barrier function (ABF) based adaptive super-twisting control scheme with non-fragility. The specialty of the proposed scheme is that it removes the error transformation process, and therefore simplifies the design of PPC. Furthermore, the ABF is combined with an online adaptation law to solve the problem of fragility inherent to the traditional PPC. The proposed method is robust to actuator faults, unknown initial states, and sudden disturbances. The stability of the system is proved via the Lyapunov framework. Finally, experiments on a two-degree-of-freedom (2-DOF) helicopter platform are conducted to verify the... More >
Graphical Abstract