
ICCK Transactions on Intelligent Unmanned Systems
ISSN: 2998-9140 (Online)
Email: [email protected]

Unmanned Aerial Vehicle (UAV) networks, particularly Flying Ad-Hoc Networks (FANETs), are gaining significant attention due to their versatility and applicability across various domains, including disaster response, environmental monitoring, surveillance, and logistics [1]. FANETs, as a specialized form of Mobile Ad-Hoc Networks (MANETs), consist of a collection of UAVs that communicate with one another dynamically to form a network [2]. Unlike conventional ground-based networks, FANETs introduce unique challenges due to the highly mobile and often unpredictable nature of UAVs, which frequently adjust their positions in three-dimensional space [3]. This dynamic structure of FANETs is essential for enhancing connectivity and extending network coverage, making them effective for rapid deployments over extensive and remote areas [4]. However, maintaining reliable communication links between UAVs in FANETs is complex, as it demands continuous adaptation to mobility, environmental conditions, and signal interference [5].
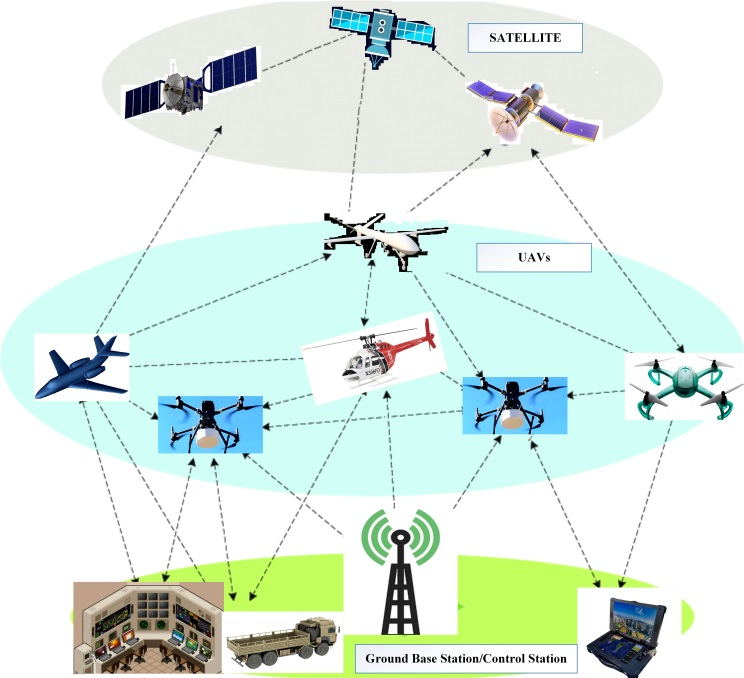
One of the most pressing challenges in FANETs is the issue of communication delay, which directly affects the network's overall performance and reliability [6]. Given the high mobility of UAVs and their dependence on wireless communication, maintaining a consistent and low-latency connection is particularly challenging. Delays can arise from several factors, such as queuing at nodes, signal propagation over long distances, processing at intermediate hops, and rerouting due to UAV mobility [7]. Additionally, frequent changes in topology due to UAV movements create disruptions in data forwarding paths, leading to an increase in network latency and packet loss [8]. For applications such as real-time surveillance or emergency response, where timely data delivery is critical, excessive delay can undermine the mission objectives, rendering FANETs unsuitable for high-stakes tasks [9]. Addressing delay is thus a central concern in FANETs, as it can significantly impact the effectiveness and reliability of UAV-based applications [10]. Figure 1 illustrates the communication scenario of UAV network.
Energy consumption is another fundamental issue in FANETs, as UAVs typically operate on limited battery power, which constrains their operational range and lifespan [11]. Energy constraints are more pronounced in FANETs compared to traditional networks, as UAVs consume considerable power not only for data transmission but also for maintaining flight. Energy-efficient operation is therefore crucial to maximize UAV availability and network longevity, especially in missions requiring extended coverage or persistent monitoring [12]. Various factors, such as transmission distance, data load, and onboard processing, contribute to energy depletion. Long communication ranges demand higher transmission power, which can quickly drain the battery [13]. Likewise, frequent re-establishments of communication links due to mobility intensify energy usage, further limiting UAV endurance [14]. Effective energy management strategies are therefore necessary to optimize resource utilization in FANETs, ensuring that UAVs can perform their tasks without frequent recharging or replacement, which may not be feasible in many deployment scenarios.
To address the combined challenges of delay and energy efficiency in FANETs, the following contributions are set:
Delay and Energy Aware Routing (DEAR) protocol has been proposed as an optimized solution.
The DEAR protocol focuses on minimizing network latency while conserving energy by dynamically selecting routing paths that satisfy predefined thresholds for delay and residual energy.
By incorporating delay and energy metrics into the routing decision process, DEAR ensures that only UAVs with sufficient energy and low expected delay participate in the data forwarding paths.
This dual consideration enhances network stability and extends operational time by avoiding the overuse of UAVs with limited energy reserves or unstable communication links.
Through the DEAR protocol, FANETs can achieve a balance between performance and longevity, making them better suited for real-time and prolonged missions. The protocol adapts to network dynamics, selecting the most reliable routes based on current energy and delay constraints, ultimately optimizing UAV performance and enabling robust, efficient FANET operations.
The rest of the paper is organized into four main Sections. The second Section provides background information and reviews related work. The third section introduces the proposed methodology.The fourth Section details with the experimental results. Finally, fifth Section concludes this work.
In their work, Noor et al. [1] examined delay-sensitive routing protocols for FANETs, highlighting how network delay affects data transmission in real-time applications. The study evaluates various routing strategies, concluding that delay-aware protocols are crucial for maintaining communication reliability in high-mobility networks, especially during mission-critical operations. This research provides insight into the importance of delay consideration in FANETs, which has direct implications for DEAR protocols.
Ahmad et al. [2] analyzed energy-efficient routing mechanisms in UAV networks, focusing on minimizing power consumption to extend network lifetime. Their study proposed energy-aware metrics to optimize data routing paths based on UAVs' residual energy levels. This work underscores the necessity of energy efficiency in UAV networks, a principle integral to DEAR protocols, which seek to balance delay and energy consumption. Toorchi et al. [3] developed an adaptive routing protocol that dynamically adjusts paths based on the mobility patterns and energy levels of UAVs. Their approach prioritizes UAVs with stable connectivity and sufficient power, which aligns with DEAR's objectives of delay and energy awareness. The authors suggest that adaptive routing is effective in reducing delay and managing energy resources, providing a foundation for DEAR-type protocols. Zheng et al. [4] proposed a threshold-based routing protocol for FANETs that selects forwarding nodes based on energy and distance thresholds. The approach aims to limit energy consumption and extend the operational time of the UAV network. This research is highly relevant to DEAR, as it demonstrates the utility of threshold values for enhancing both delay performance and energy efficiency in dynamic networks. Zhang et al. [5] explored multi-objective routing for UAV networks, aiming to optimize both delay and energy metrics. By integrating multiple factors into the routing decision, their protocol achieves a balanced network performance, suitable for high-mobility environments like FANETs. Their findings support the DEAR protocol's approach of considering delay and energy thresholds to enhance routing efficiency. Guo et al. [6] introduced a hierarchical routing protocol that reduces energy consumption by selecting energy-efficient paths based on the hierarchical structure of UAV formations. Their work highlights the significance of conserving energy in UAV networks, providing insights into how hierarchical routing models can be beneficial in delay and energy-sensitive protocols like DEAR. Alipour-Fanid et al. [7] conducted an extensive performance analysis of delay-aware routing protocols in UAV networks, examining factors like mobility, network density, and path loss. Their research underscores the impact of delay on data delivery reliability and confirms the need for protocols that integrate delay constraints, as seen in DEAR. Li et al. [8] proposed a cross-layer design for delay and energy optimization, enabling the routing layer to consider link-layer metrics for improved efficiency. By jointly optimizing delay and energy consumption, the protocol achieves better performance in dynamic UAV networks. Their work provides a structural basis for DEAR's combined delay-energy approach. Wang et al. [9] introduced a load-balancing protocol for UAV networks, which distributes communication tasks based on energy levels to avoid depleting UAVs prematurely. This load-balancing approach complements DEAR's goal of extending network lifespan through energy-aware routing, as it minimizes energy drain in critical nodes. Quy et al. [10] examined QoS-aware routing protocols that address quality-of-service requirements in high-mobility networks, focusing on delay and reliability. Their findings show that delay and QoS parameters can significantly impact UAV network efficiency, validating the importance of integrating such metrics into DEAR protocols. Recent research in FANETs has explored various routing protocols to address challenges in mobility, network stability, and energy efficiency. Hussain et al. [11] introduced the Delay and Link Stability Aware (DLSA) protocol, which prioritizes stable links to reduce packet loss and delay in highly dynamic FANET environments on this. Hussain et al. [12] proposed the Cooperative Delay and Link Stability Aware (Co-DLSA) protocol. Co-DLSA integrates a relay strategy that further enhances link stability and mitigates network fragmentation, particularly under high node mobility. The Inergy-Efficient Distributed Link Stability Algorithm (IEE-DLSA), presented by Hussain et al. [13] extended this work by introducing energy efficiency to link stability considerations. This protocol reduces energy consumption through adaptive routing that balances node energy levels, thus prolonging network lifetime. Xu et al. [14] vanced link stability-oriented protocols with the Link Stability and Transmission Delay Aware (LSTDA) routing mechanism. LSTDA aims to minimize delay while maintaining stable link connections, which is essential for data-intensive FANET applications. Other recent studies have elligent control techniques in unmanned systems. Hu et al. [15] focused on model predictive control for trajectory tracking in autonomous deep-sea mining vehicles, highlighting advanced control for maintaining vehicle stability and path precision in extreme underwater conditions. Wang et al. [16] reviewed techdetecting driver fatigue, underscoring the importance of intelligent monitoring systems in enhancing safety in autonomous and unmanned vehicles. Collectively, these studies contribute to the edscape of intelligent and resilient routing and control mechanisms in both FANETs and autonomous vehicle systems [17]. While the reviewed articles provide valuable insights into delay and energy-efficient routing in UAV networks, several limitations persist in addressing the complex, dynamic nature of UAV communication systems. Many of the proposed protocols, such as those focusing on delay sensitivity and energy conservation [1, 2, 5] primarily address either delay or energy in isolation, often without considering the synergistic effects of managing both parameters simultaneously. For instance, protocols that prioritize delay minimization [1, 7] may overlook the impact of frequent path updates on energy consumption, leading to rapid depletion of UAV resources. Similarly, while energy-focused protocols are essential [2, 4], they may inadvertently increase latency, thus compromising the performance of time-sensitive applications. Moreover, the hierarchical and adaptive routing approaches [3, 6] are effective at improving specific metrics but face scalability and interoperability issues as UAV networks grow in size and complexity. Additionally, cross-layer designs [8] and load-balancing techniques [9] attempt to address energy consumption and delay together but lack adaptability in scenarios with rapidly changing topologies or highly mobile environments, making them less suitable for real-world FANET applications.
The research gap lies in the need for a comprehensive protocol that balances both delay and energy consumption without compromising the network's overall performance and longevity. Current solutions are limited in their ability to dynamically adapt to unpredictable UAV movements while ensuring consistent network connectivity and extended operational time. A lack of adaptive threshold-based mechanisms for balancing delay and energy simultaneously remains a key issue, as many protocols lack flexible metrics that can be adjusted based on real-time network conditions [3, 6, 18]. Moreover, many of the existing protocols do not address the need for efficient re-routing mechanisms that can reduce delays without incurring high energy costs. Addressing this gap requires the development of a protocol like DEAR that integrates both delay and energy-aware strategies within a single framework, incorporating adaptive threshold values for delay and energy and leveraging real-time network data to optimize path selection. This would enable UAV networks to function effectively across a wide range of applications, from real-time data collection to extended surveillance missions, while enhancing both reliability and energy efficiency in dynamic and high-mobility environments.
DLSA [11], LSTDA [14], and Alipour-Fanid et al. [7] proposed delay-aware routing protocols are designed to minimize end-to-end communication delays, making them highly suitable for applications requiring real-time data delivery, such as surveillance and mission-critical operations. By prioritizing delay reduction, these protocols ensure timely and reliable communication in high-mobility environments like FANETs [19]. While these protocols excel in reducing delays, the frequent path recalculations required to achieve this can lead to increased energy consumption. This, in turn, accelerates battery depletion in UAVs, limiting network longevity and operational performance.
Ahmad et al. [2], Zheng et al. [4], IEE-DLSA [13] introduced energy-aware routing protocols focus on optimizing energy consumption, which helps to extend the overall network lifetime. By selecting energy-efficient paths, these protocols ensure sustained connectivity and longer operational times, making them ideal for prolonged UAV missions. Despite their energy efficiency, these protocols often fail to prioritize communication delays. As a result, the chosen paths may not be optimal for time-sensitive applications, compromising real-time performance and quality of service.
Toorchi et al. [3], Guo et al. [6] proposed adaptive routing protocols dynamically adjust routing decisions based on factors such as UAV mobility patterns, energy levels, and link stability. This adaptability enhances their performance in dynamic environments, allowing them to respond effectively to changes in network topology. The flexibility offered by adaptive protocols comes at a cost. The computational overhead required to support dynamic routing can be significant, particularly in larger networks. Additionally, scalability becomes a challenge as the network size increases, leading to performance degradation in complex FANETs.
Li et al. [8], Zhang et al. [5], Wang et al. [9] proposed protocols integrate multiple performance metrics, such as energy consumption, delay, and load distribution, into the routing decisions. By addressing multiple objectives simultaneously, they achieve a balanced network performance that considers diverse operational requirements. The complexity of multi-objective optimization makes these protocols computationally intensive. Furthermore, they may struggle to adapt effectively in scenarios with highly dynamic topologies, where frequent changes in UAV positions and network conditions can hinder their effectiveness.
Wang et al. [9] presented load-balancing routing protocols aim to distribute communication tasks evenly across UAV nodes, preventing resource depletion in critical nodes. By balancing energy usage, these protocols enhance the overall network lifetime and reduce the risk of premature UAV failures. While load balancing is effective for energy management, these protocols do not always account for end-to-end delays. This oversight can result in reduced communication efficiency, particularly for real-time applications that require minimal latency.
Guo et al. [6] proposed hierarchical routing protocols organize UAV nodes into structured layers, enabling efficient management of energy resources and path selection. By leveraging hierarchical structures, these protocols optimize energy-efficient communication paths and enhance scalability in moderately dynamic networks. Despite their advantages, hierarchical approaches face scalability limitations in highly dynamic FANET environments. Frequent topology changes can disrupt the hierarchical structure, reducing the protocol's effectiveness in managing routing decisions.
The classification highlights that while delay-aware and energy-aware protocols individually address critical metrics, they fail to optimize both simultaneously. Adaptive and multi-objective protocols attempt to balance multiple metrics but face issues of scalability, adaptability, and computational overhead in dynamic FANET environments. DEAR combines the strengths of these approaches by integrating delay and energy thresholds into a single framework. Unlike static threshold-based protocols, DEAR dynamically adjusts thresholds based on real-time network conditions, ensuring low-latency and energy-efficient communication. DEAR's superior performance, validated through simulation comparisons, demonstrates its effectiveness in addressing the limitations of existing approaches.
UAV networks are inherently dynamic, with frequent topology changes due to the mobility of nodes. This high mobility causes frequent path disruptions and requires continuous path recalculations, leading to delays and increased energy consumption. UAVs operate on limited battery power, making energy efficiency a critical factor for network longevity. Most existing protocols, as reviewed in the literature, focus on either delay minimization or energy conservation in isolation. Delay-sensitive protocols, such as DLSA [11], LSTDA [14], and Co-DLSA [12], prioritize minimizing end-to-end delay but often neglect energy consumption, resulting in rapid depletion of UAV resources. Conversely, energy-aware protocols, like IEE-DLSA [13] and threshold-based methods [4], prolong network lifetime but compromise delay, which can be detrimental for real-time applications. There exists a clear research gap in developing protocols that jointly optimize both delay and energy efficiency. For UAV networks operating in critical applications such as surveillance and search and rescue [20, 21], it is essential to achieve low-latency communication without exhausting the energy reserves of UAVs. DEAR addresses this gap by integrating both metrics into its routing decisions, using adaptive thresholds for delay and energy.
The proposed methodology for the Delay and Energy Aware Routing (DEAR) protocol in UAV networks is designed to address the critical challenges of balancing network latency and energy consumption in highly dynamic environments. In UAV-based FANETs, the frequent mobility of nodes, varying transmission distances, and power limitations necessitate a routing mechanism that adapts intelligently to changing conditions. DEAR is crafted as a dual-objective protocol, incorporating both delay and energy-aware strategies to optimize routing paths based on real-time network conditions. This methodology introduces a dynamic threshold mechanism for delay and energy metrics, ensuring that only UAVs with adequate residual energy and minimal delay contribute to data forwarding paths. By integrating real-time evaluations of node conditions and utilizing adaptive threshold values, DEAR provides a flexible approach to selecting routes that prioritize energy efficiency without compromising on the timely delivery of data. This makes DEAR particularly well-suited for mission-critical applications that require low-latency communication alongside prolonged UAV network operation.
A core aspect of DEAR's methodology is its adaptive decision-making algorithm, which assesses each UAV node based on its energy levels and projected delay, selecting the most optimal path through a multi-criteria approach. To achieve this, DEAR employs energy threshold () and delay threshold () parameters, which are dynamically adjusted based on the network's operational context and mission requirements. These thresholds function as flexible benchmarks, dictating node selection criteria for routing. When a UAV's energy falls below , it is temporarily removed from the active routing pool to conserve energy for critical needs, while nodes exceeding the threshold in delay are also omitted to maintain low-latency communication. This adaptive exclusion process reduces the risk of network fragmentation, as nodes are re-evaluated and re-integrated based on updated energy and delay values, ensuring a sustainable routing structure over extended operation times.
Moreover, DEAR employs a data-forwarding mechanism that uses a combination of multi-hop routing and selective relay nodes, chosen based on their proximity and stability in connection. This approach minimizes retransmissions and redundant data paths, thereby reducing overall delay and preventing unnecessary energy expenditure. By utilizing relay nodes judiciously, DEAR avoids the high-energy drain associated with frequent long-distance transmissions while still achieving timely data delivery across the network. The protocol further leverages real-time communication metrics to adaptively adjust node participation in the routing process, thereby enabling continuous operation under fluctuating environmental conditions and high node mobility.
To develop a detailed mathematical model for the DEAR protocol in UAV networks, we'll define a set of equations that collectively address the key components: energy consumption, delay estimation, route selection based on thresholds, and updating the UAV's status based on energy and delay constraints.
Each UAV has an initial energy value, , and as data is transmitted or received, its residual energy decreases.
where : Residual energy of UAV i after t time intervals, and : Energy consumed in time interval .
The energy consumption for transmitting a data packet of length l over a distance from UAV i to UAV j is given by:
where : Base transmission power, and : Amplifier energy constant for free-space propagation.
The energy consumed when UAV i receives a data packet of length l is:
where denotes the power required for reception.
The total energy consumed by a UAV for both transmission and reception over one communication cycle is:
A UAV is eligible to participate in data forwarding only if its residual energy meets a predefined threshold, :
The delay for transmitting data from UAV i to UAV j depends on multiple components:
where : Speed of UAV, : Processing delay, and : Queuing delay.
A path is considered if the total delay is below the delay threshold
For a multi-hop route with k hops from source s to destination d, the total delay is:
Each UAV route is evaluated based on its delay and energy attributes using weight factors and :
where and are constants balancing energy and delay considerations.
For each possible route, the routing metric must satisfy the condition:
where denotes the threshold for route acceptability.
Data: Initial energy for each UAV ;
Delay threshold ;
Energy threshold ;
Packet length
Result: Forward data packets to the optimal next hop
Initialize each UAV with energy and set residual energy ;
for each UAV do
if then
skip this UAV as it does not meet the energy threshold;
end if
Select Candidate Nodes:;
for each neighboring UAV of do
Calculate distance ;
Estimate transmission energy using Equation 2;
Calculate path delay using Equation 6;
if then
mark UAV as a candidate;
end if
end for
Calculate Routing Metric for Candidates:;
for each candidate UAV do
Compute routing score using Equation 9;
end for
Select Next Hop:;
Choose UAV with the lowest routing metric ;
Verify that . If no candidates meet this criterion, repeat with alternative candidates;
Forward Data Packet:;
Send the data packet to the selected UAV ;
Update residual energy using Equation 11;
end for
After each data transmission and reception, the residual energy of each UAV node i is updated as:
The transmission power can be dynamically adjusted based on the distance to reduce energy consumption:
The expected route lifetime is determined by the residual energy along the route R:
where is the average energy consumption per transmission cycle for node i.
The probability that a link between UAV i and UAV j remains stable is a function of delay and distance:
where is the maximum allowable distance for stable communication.
The expected number of hops in a route is inversely proportional to the energy threshold:
where denotes the average residual energy in the network.
This forms the core of the DEAR protocol's functionality, addressing the key factors of delay, energy, stability, and routing criteria within UAV networks. By applying these formulas iteratively, the DEAR protocol selects optimal routes that are both energy-efficient and meet delay requirements, ensuring long-term network sustainability and performance.
Initial energy for each UAV : 20Joules;
Delay threshold ;
Energy threshold ;
Communication threshold ;
Packet length ;
Number of hops
Result: Optimal route to destination based on delay and energy criteria
Initialize each UAV with energy and set ;
Route Discovery:;
for each possible route from source to destination with up to hops do
Initialize total route delay and total energy consumption ;
Evaluate Each Hop:;
for each hop in the route do
Calculate distance and compute using Equation 2;
Estimate path delay using Equation 6;
Add to for the total route delay;
Check Energy Threshold for UAV :;
if then
discard route;
end if
Add to ;
end for
Verify Delay and Energy Thresholds:;
if or then
discard route;
end if
else
mark the route as feasible;
end if
end for
Compute Route Metric:;
for each feasible route do
Calculate routing metric using Equation 9;
end for
Select Optimal Route:;
Choose the route with the lowest metric and verify that ;
if no route meets this criterion then
increase or decrease and repeat from Route Discovery step;
end if
Forward Packet Along Selected Route:;
for each hop in the selected route do
Update residual energy of each UAV along the route based on Equation 11;
end for
The Algorithm 1 and 2 ensure that the DEAR protocol forwards data packets along the most efficient routes based on both delay and energy awareness, extending network lifetime and optimizing overall communication in UAV networks. In short, DEAR's methodology represents a novel approach that combines delay-sensitive and energy-aware routing strategies into a unified framework, capable of addressing the unique demands of UAV-based FANETs. Through dynamic threshold values, adaptive decision-making, and efficient data forwarding, DEAR optimizes both delay and energy metrics, promoting network longevity and reliable performance. This methodology ensures that FANETs are equipped to handle diverse operational requirements, from emergency response to environmental monitoring, providing an adaptable solution that enhances the robustness, efficiency, and resilience of UAV networks.
The Delay and Energy Aware Routing (DEAR) protocol has demonstrated superior performance compared to the other protocols, namely DLSA, Co-DLSA, IEE-DLSA, and LSTDA, in terms of key evaluation metrics: Packet Delivery Ratio (PDR), End-to-End Delay, Throughput, Network Lifetime, Total Residual Energy, and Path Loss. The following subsections provide a detailed discussion of the performance of DEAR against these protocols in terms of each evaluation metric.
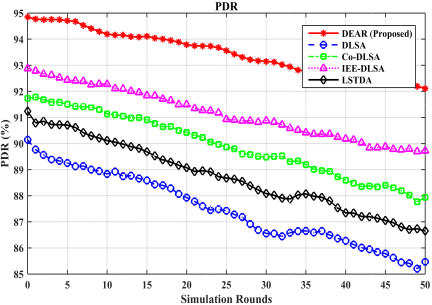
DEAR consistently outperformed all the other protocols in terms of PDR across all simulation rounds as shown in Figure 2. The PDR is a crucial metric as it indicates the reliability and efficiency of data transmission in the network. DEAR achieves the highest PDR due to its delay and energy-aware routing strategy, which dynamically adjusts its routing decisions based on node energy levels and transmission delays. This ensures that the most reliable and energy-efficient paths are selected, minimizing packet loss. By considering both energy levels and delay constraints in its routing decisions, DEAR ensures that the most optimal paths are used, resulting in fewer packet drops and a higher PDR compared to DLSA, Co-DLSA, IEE-DLSA, and LSTDA, which either fail to dynamically adjust based on both factors or rely on suboptimal path selection mechanisms. DLSA and Co-DLSA exhibit comparatively lower PDR due to their less adaptive nature in handling energy constraints and delays. While IEE-DLSA improves upon this by introducing energy-efficient strategies, it still cannot match the level of adaptively achieved by DEAR. Similarly, LSTDA has a fixed routing scheme that does not dynamically respond to real-time changes in node energy or network delay, leading to reduced packet delivery performance.
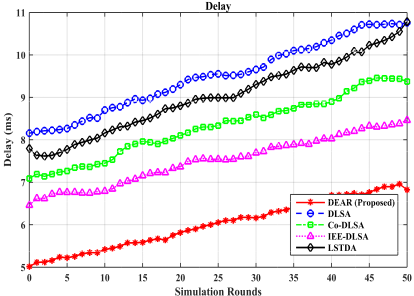
The end-to-end delay is a critical performance indicator for UAV networks, particularly in real-time applications such as video streaming or communication systems. DEAR shows the lowest end-to-end delay compared to all the other protocols as shown in Figure 3. This is because DEAR employs adaptive routing that considers both energy and delay, ensuring that data packets are forwarded via the most efficient paths with minimal delay. It avoids overloading nodes with high energy consumption or long transmission times, thus reducing the overall delay in the network. In contrast, DLSA and Co-DLSA suffer from higher delays due to their suboptimal path selection mechanisms, which fail to efficiently balance energy usage and transmission times. IEE-DLSA, while addressing energy concerns, still experiences increased delay due to its reliance on static decision-making without considering real-time network conditions. LSTDA also shows relatively higher delay as it does not incorporate real-time energy and delay metrics, resulting in less optimal routing and longer packet transmission times.
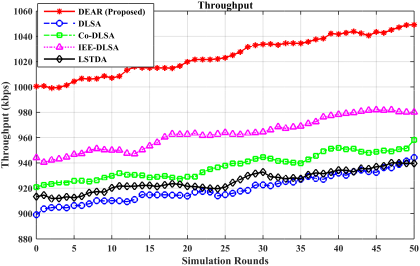
DEAR excels in throughput, achieving the highest throughput across all simulation rounds as shown in Figure 4. Throughput is directly influenced by the network's ability to deliver data packets efficiently, and DEAR ensures that energy-efficient paths with low delay are chosen, allowing for a higher volume of data to be transmitted successfully. DEAR's adaptive routing prevents network congestion and overloading of nodes, leading to better utilization of available bandwidth and higher throughput. The other protocols, including DLSA, Co-DLSA, and IEE-DLSA, demonstrate lower throughput due to either inefficient energy consumption or longer transmission delays. These factors lead to data packet losses and inefficient use of network resources, causing a decrease in throughput. LSTDA, while performing well in certain conditions, also faces throughput limitations as it does not actively optimize for energy or delay, leading to network inefficiencies and lower data transmission rates.
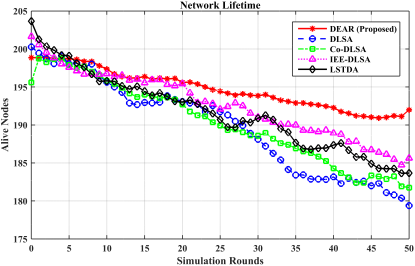
One of the most notable advantages of DEAR is its impact on network lifetime. DEAR's energy-aware routing protocol ensures that the energy consumption of nodes is efficiently balanced by dynamically selecting routes that minimize energy usage, especially for nodes with lower energy levels. This adaptive approach prolongs the network's lifetime by preventing energy depletion in critical nodes. As a result, DEAR demonstrates the longest network lifetime compared to DLSA, Co-DLSA, IEE-DLSA, and LSTDA as shown in Figure 5. The other protocols, particularly DLSA and Co-DLSA, do not adequately address energy consumption across the entire network. These protocols may route traffic through nodes with high energy consumption, leading to premature node failure. While IEE-DLSA introduces some energy-aware routing, it still lacks the dynamic energy management employed by DEAR, which is key to prolonging network lifetime. LSTDA faces similar issues, where nodes tend to deplete their energy reserves quickly due to inefficient routing strategies, resulting in reduced network lifetime.
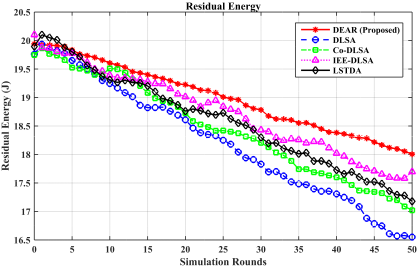
DEAR achieves the best performance in terms of total residual energy across all simulation rounds as shown in Figure 6. The protocol effectively minimizes energy consumption by selecting energy-efficient paths, thereby preserving the energy of the nodes for a longer period. This results in greater residual energy across the network, which is a key metric for ensuring sustainable network operation in UAV-based networks. By intelligently managing the energy levels of the nodes, DEAR helps maintain the operation of the network for a longer duration. DLSA, Co-DLSA, and IEE-DLSA show significantly lower residual energy due to their less efficient energy management mechanisms. While IEE-DLSA does consider energy efficiency to some extent, it does not perform as well as DEAR in dynamically managing the energy distribution across nodes. LSTDA, despite its robustness in certain scenarios, lacks energy-aware routing, leading to quicker energy depletion and lower residual energy.
| Protocol | PDR | E-to-E Delay | Kpbs | Alive vs Dead Nodes | Total RE | Path Loss |
|---|---|---|---|---|---|---|
| DLSA [11] | Low | High | Low | Medium | Low | High |
| Co-DLSA [12] | Low | High | Low | Medium | Low | High |
| IEE-DLSA [13] | Medium | Medium | Medium | Medium | Medium | Medium |
| LSTDA [14] | Medium | Medium | Medium | Low | Low | High |
| DEAR | Very High | Very Low | Very High | Very High | Very High | Very Low |
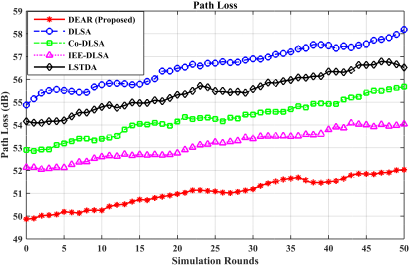
DEAR exhibits the lowest path loss compared to all the other protocols as shown in Figure 7. Path loss in UAV networks is influenced by several factors, including node distance, environmental conditions, and routing decisions. DEAR mitigates path loss by selecting optimal paths that minimize transmission distance and maintain stable communication channels. The dynamic nature of DEAR ensures that data packets are transmitted over the most efficient paths, minimizing signal attenuation. The other protocols, especially DLSA and Co-DLSA, suffer from higher path loss due to their less effective routing decisions, which may involve longer transmission paths or paths through nodes with poor signal quality. IEE-DLSA attempts to optimize energy use, but it still struggles with path loss due to its suboptimal routing schemes. LSTDA does not dynamically consider path loss as part of its routing process, resulting in higher path loss values compared to DEAR.
Based on the performance evaluation metrics for DEAR, DLSA, Co-DLSA, IEE-DLSA, and LSTDA routing protocols, Table 1 shows their values in terms of "Very Low," "Low," "Medium," "High," and "Very High" to categorize their performance across all six metrics.
The DEAR protocol significantly outperforms DLSA, Co-DLSA, IEE-DLSA, and LSTDA across all evaluated metrics, including PDR, End-to-End Delay, Throughput, Network Lifetime, Total Residual Energy, and Path Loss. The superior performance of DEAR can be attributed to its adaptive routing scheme, which simultaneously considers energy efficiency and delay reduction. By dynamically adjusting routing decisions based on real-time energy levels and transmission delays, DEAR ensures that the network operates efficiently, maintains a high level of performance, and extends the overall lifetime of the network.
Effectiveness of DEAR in Solving Existing Problems
DEAR simultaneously optimizes end-to-end delay and energy consumption, achieving a balance between network efficiency and longevity. Unlike hierarchical and static threshold-based approaches [6], DEAR dynamically adapts thresholds based on real-time energy levels and delay constraints, ensuring consistent performance in highly mobile environments. Through extensive simulations, DEAR demonstrates superior performance compared to state-of-the-art protocols like DLSA, Co-DLSA, IEE-DLSA, and LSTDA. DEAR achieves notable improvements in metrics such as PDR, Throughput, Network Lifetime, and Residual Energy, delay, and dB, thereby validating its effectiveness in addressing the limitations of existing approaches.The Delay and Energy Aware Routing (DEAR) protocol proposed in this study has been shown to significantly enhance the performance of UAV networks, specifically FANETs, by addressing critical challenges related to energy efficiency and delay reduction. Through extensive simulations and comparative analysis with state-of-the-art protocols such as DLSA, Co-DLSA, IEE-DLSA, and LSTDA, DEAR has demonstrated superior performance across multiple metrics, including Packet Delivery Ratio (PDR), End-to-End Delay, Throughput, Network Lifetime, Total Residual Energy, and Path Loss. By dynamically considering both the energy consumption and delay constraints during the routing process, DEAR effectively ensures the selection of energy-efficient paths that minimize transmission delays, resulting in reliable, high-throughput, and long-lasting UAV network operation. The results indicate that DEAR outperforms existing protocols, thanks to its adaptive approach to routing decisions. The protocol's ability to prolong network lifetime by efficiently managing node energy, while simultaneously reducing delay and path loss, makes it a promising solution for future UAV-based applications, especially in real-time data transmission and mission-critical scenarios. The emphasis on energy-aware routing also ensures that DEAR provides robust performance even in networks with limited energy resources, such as those found in UAV systems where battery life is a significant constraint.
However, there are still some areas that require further exploration to enhance the practical implementation and scalability of the DEAR protocol. In particular, future work could focus on the integration of advanced machine learning techniques for real-time energy and delay prediction to optimize routing decisions dynamically. Moreover, the interaction between network density and the quality of service (QoS) in highly dynamic UAV environments could be further studied to refine DEAR's scalability in large-scale networks. Additionally, incorporating mobility models and interference management into the routing protocol could help mitigate challenges in highly mobile and crowded UAV networks. Another promising direction for future work lies in the application of 5G and 6G technologies in conjunction with DEAR. The next-generation communication networks offer enhanced communication speeds, low latency, and high reliability, which could be leveraged to further improve the performance of DEAR in highly demanding environments such as urban air mobility and large-scale aerial surveillance. Finally, the security aspects of routing in UAV networks, including data privacy and attack resilience, are critical to ensure the robustness and trustworthiness of DEAR in mission-critical applications. Future research should aim to integrate security features into the DEAR protocol to address these concerns and ensure the safety and integrity of UAV network operations. In conclusion, while DEAR has shown great promise in solving the delay and energy challenges in UAV networks, its continued evolution will likely unlock even greater potential for various real-world applications. By addressing the limitations identified and incorporating emerging technologies, DEAR can become an even more powerful tool for enhancing the performance and sustainability of UAV-based communication networks in the future.

Portico
All published articles are preserved here permanently:
https://www.portico.org/publishers/icck/