ICCK Transactions on Sensing, Communication, and Control | Volume 3, Issue 1: 54-63, 2026 | DOI: 10.62762/TSCC.2025.553018
Abstract
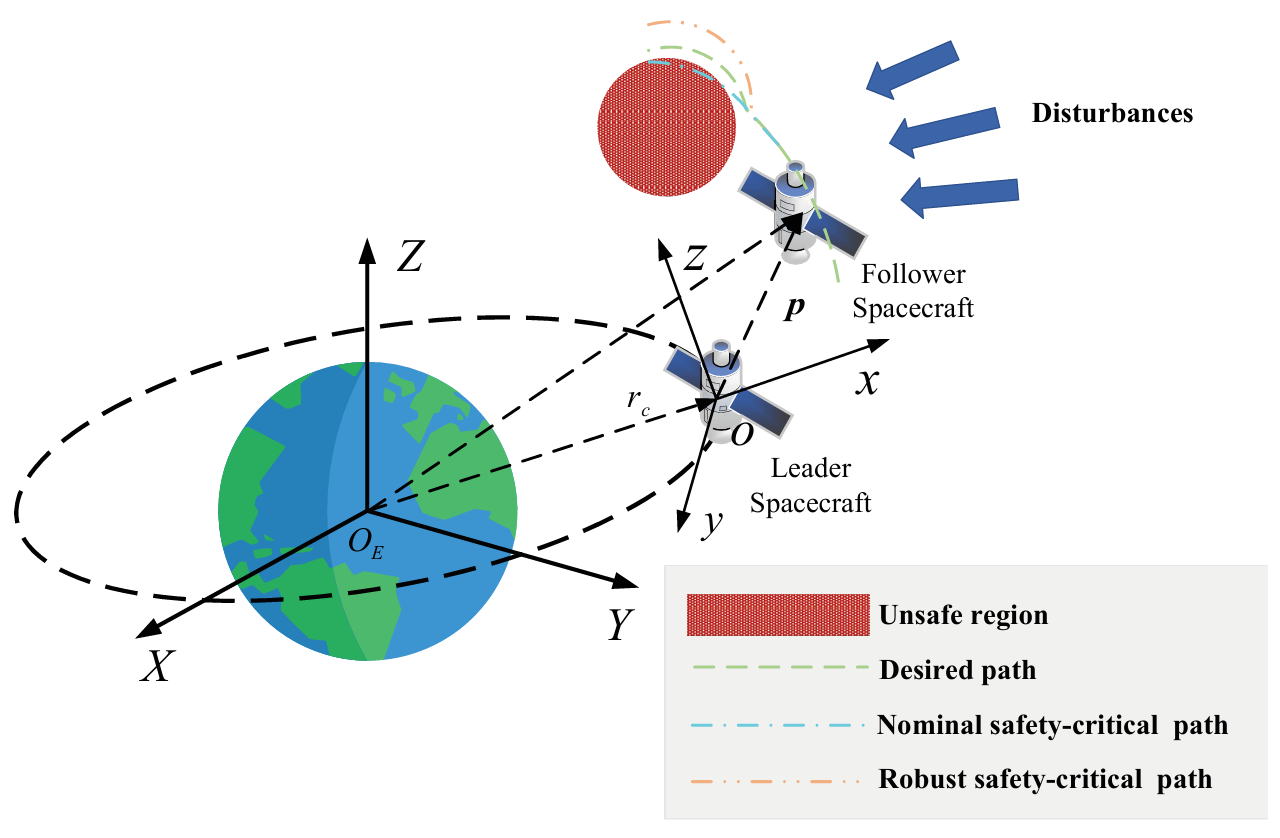
A safety-critical control scheme based on fully actuated system approach (FASA) framework is developed for spacecraft relative motion tracking under external disturbances and multiple forbidden regions. For tracking performance, the nominal controller is designed by using the FASA framework, such that the controller design process can be simplified. For safety constraints, a disturbance-tolerant control barrier function incorporating low-pass filtered disturbance compensation is introduced to mitigate interference effects. Furthermore, a sequential correction strategy is developed to resolve safety constraints through offline-computed quadratic program (QP) solutions, which can eliminate dep... More >
Graphical Abstract