A Safety-Critical Control Scheme for Spacecraft Relative Motion Tracking Based on the Fully Actuated System Approach and Offline QP Solutions


Article Information
Abstract
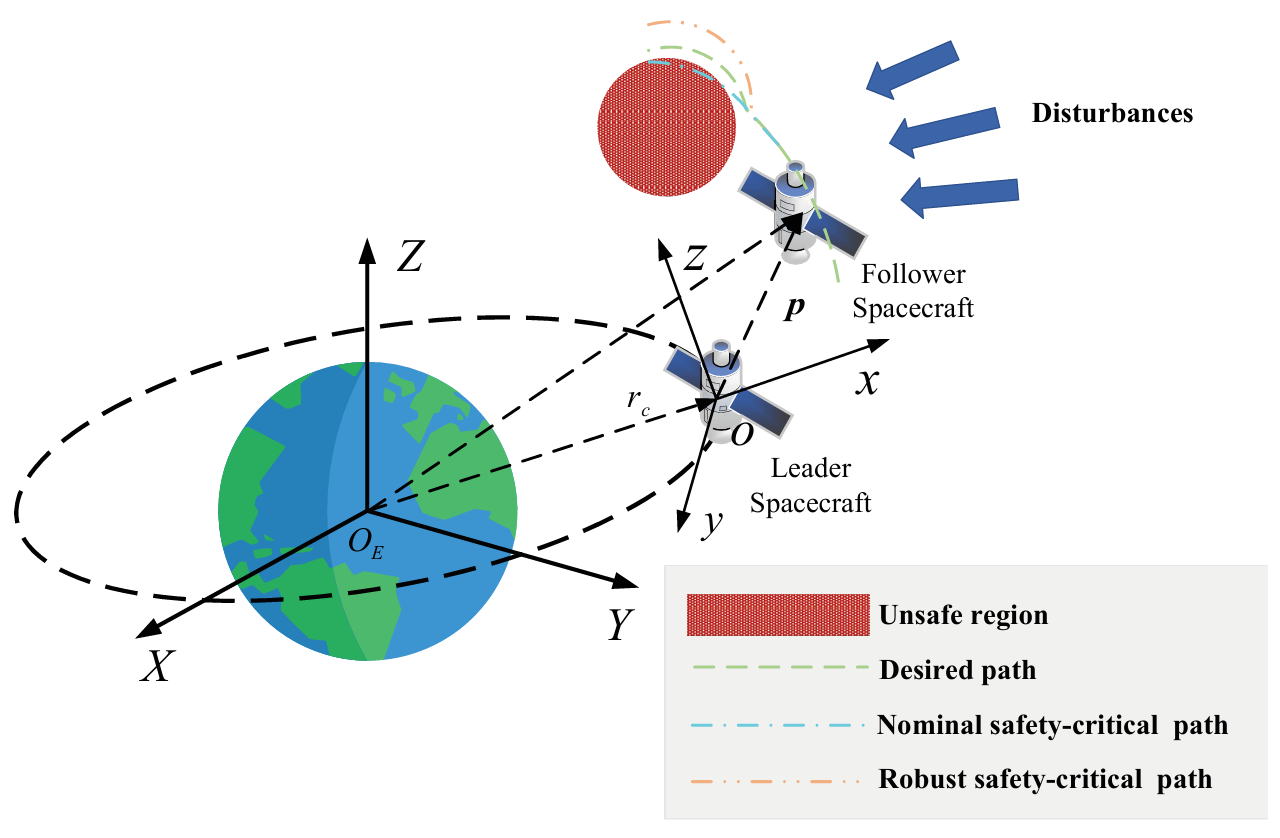
A safety-critical control scheme based on fully actuated system approach (FASA) framework is developed for spacecraft relative motion tracking under external disturbances and multiple forbidden regions. For tracking performance, the nominal controller is designed by using the FASA framework, such that the controller design process can be simplified. For safety constraints, a disturbance-tolerant control barrier function incorporating low-pass filtered disturbance compensation is introduced to mitigate interference effects. Furthermore, a sequential correction strategy is developed to resolve safety constraints through offline-computed quadratic program (QP) solutions, which can eliminate dependence on real-time optimization of the QP solver. Theoretical analysis confirms that the proposed control scheme simultaneously guarantees collision avoidance and the spacecraft relative motion tracking. Numerical simulations further validate the effectiveness of the proposed approach.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
AI Use Statement
Ethical Approval and Consent to Participate
References
- Shi, Y., Hu, Q., Li, D., & Lv, M. (2023). Adaptive optimal tracking control for spacecraft formation flying with event-triggered input. IEEE Transactions on Industrial Informatics, 19(5), 6418–6428.
[CrossRef] [Google Scholar] - Guelman, M., Kogan, A., Kazarian, A., Livne, A., Orenstein, M., & Michalik, H. (2005). Acquisition and pointing control for inter-satellite laser communications. IEEE Transactions on Aerospace and Electronic Systems, 40(4), 1239-1248.
[CrossRef] [Google Scholar] - Cui, B., Xia, Y., Liu, K., Wang, Y., & Zhai, D. H. (2019). Velocity-observer-based distributed finite-time attitude tracking control for multiple uncertain rigid spacecraft. IEEE Transactions on Industrial Informatics, 16(4), 2509-2519.
[CrossRef] [Google Scholar] - Horstkötter, E., & Zhu, Q. (2025). Computational experimental test on PID controlled fixed wing aircraft systems. ICCK Transactions on Sensing, Communication, and Control, 2(2), 95–105.
[CrossRef] [Google Scholar] - Xiang, K., Song, Y., & Ioannou, P. (2025). Nonlinear adaptive PID control for nonlinear systems. IEEE Transactions on Automatic Control, 70(10), 7000–7007.
[CrossRef] [Google Scholar] - Gao, S., Hou, Y., Dong, Y., & Li, S. (2020). Global nested PID control of strict-feedback nonlinear systems with prescribed output and virtual tracking performance. IEEE Transactions on Circuits and Systems II: Express Briefs, 67(2), 325–329.
[CrossRef] [Google Scholar] - Wang, S., & Wang, X. (2025). Fixed-time adaptive optimal parameter estimation subject to dead-zone and control of servo systems. ICCK Transactions on Sensing, Communication, and Control, 2(3), 200–214.
[CrossRef] [Google Scholar] - Wang, S., Sun, C., Chen, Q., & He, H. (2025). Composite learning fixed-time control for nonlinear servo systems with state constraints and unknown dynamics. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 55(3), 2332–2342.
[CrossRef] [Google Scholar] - Lei, Y., Wang, Z., Wang, X., Li, H., & Morărescu, I. C. (2025). Hybrid formation control for heterogeneous uncertain linear two-time-scale systems. Automatica, 176, 112267.
[CrossRef] [Google Scholar] - Shi, H., Xie, S., Chen, Q., Hu, S., & Yi, S. (2024). Adaptive tunable predefined-time backstepping control for uncertain robotic manipulators. ICCK Transactions on Sensing, Communication, and Control, 1(2), 126–135.
[CrossRef] [Google Scholar] - Yang, X., Chen, Q., Xie, S., & He, X. (2025). Adaptive predefined-time event-triggered control for attitude consensus of multiple spacecraft with time-varying state constraints. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 55(6), 3756–3768.
[CrossRef] [Google Scholar] - An, J., Cao, L., Wang, Y., Jadoon, A. K., & Wang, S. (2024). Adaptive Fault-Tolerant Optimized Platoon Cloud Tracking Control for Heterogeneous Vehicles via Dual Learning Mechanism. IEEE Transactions on Automation Science and Engineering, 22, 4382-4393.
[CrossRef] [Google Scholar] - Duan, G. R. (2020). High-order system approaches: I. Fully-actuated systems and parametric designs. Acta Automatica Sinica, 46(7), 1333–1345.
[CrossRef] [Google Scholar] - Zhang, D., Liu, G., & Cao, L. (2023). Proportional integral predictive control of high-order fully actuated networked multiagent systems with communication delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 53(2), 801–812.
[CrossRef] [Google Scholar] - Zhao, Q., & Duan, G. R. (2022). Fully actuated system approach for 6DOF spacecraft control based on extended state observer. Journal of Systems Science and Complexity, 35(2), 604–622.
[CrossRef] [Google Scholar] - Duan, G., & Liu, G. P. (2022). Attitude and orbit optimal control of combined spacecraft via a fully-actuated system approach. Journal of Systems Science and Complexity, 35(2), 623–640.
[CrossRef] [Google Scholar] - Cortez, W. S., Oetomo, D., Manzie, C., & Choong, P. (2021). Control barrier functions for mechanical systems: Theory and application to robotic grasping. IEEE Transactions on Control Systems Technology, 29(2), 530–545.
[CrossRef] [Google Scholar] - Zhang, S., Zhai, D. H., Lin, J., Xiong, Y., Xia, Y., & Wei, M. (2024). ESO-based safety-critical control for robotic systems with unmeasured velocity and input delay. IEEE Transactions on Industrial Electronics, 71(10), 13053–13063.
[CrossRef] [Google Scholar] - Xu, X. (2018). Constrained control of input–output linearizable systems using control sharing barrier functions. Automatica, 87, 195–201.
[CrossRef] [Google Scholar] - Ames, A. D., Xu, X., Grizzle, J. W., & Tabuada, P. (2016). Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control, 62(8), 3861–3876.
[CrossRef] [Google Scholar] - Xiao, W., & Belta, C. (2021). High-order control barrier functions. IEEE Transactions on Automatic Control, 67(7), 3655–3662.
[CrossRef] [Google Scholar] - Nguyen, Q., & Sreenath, K. (2021). Robust safety-critical control for dynamic robotics. IEEE Transactions on Automatic Control, 67(3), 1073–1088.
[CrossRef] [Google Scholar] - Wang, X., Yang, J., Liu, C., Yan, Y., & Li, S. (2024). Safety-critical disturbance rejection control of nonlinear systems with unmatched disturbances. IEEE Transactions on Automatic Control, 70(4), 2722–2729.
[CrossRef] [Google Scholar] - Liu, J., Sun, M., Chen, Z., & Sun, Q. (2019). Output feedback control for aircraft at high angle of attack based upon fixed-time extended state observer. Aerospace Science and Technology, 95, 105468.
[CrossRef] [Google Scholar] - Duan, G. (2021). High-order fully actuated system approaches: Part V. Robust adaptive control. International Journal of Systems Science, 52(10), 2129–2143.
[CrossRef] [Google Scholar] - Glotfelter, P., Cortés, J., & Egerstedt, M. (2017). Nonsmooth barrier functions with applications to multi-robot systems. IEEE Control Systems Letters, 1(2), 310–315.
[CrossRef] [Google Scholar] - Na, J., Jing, B., Huang, Y., Gao, G., & Zhang, C. (2020). Unknown system dynamics estimator for motion control of nonlinear robotic systems. IEEE Transactions on Industrial Electronics, 67(5), 3850–3859.
[CrossRef] [Google Scholar]
Cite This Article
TY - JOUR AU - Yang, Xiaoyu AU - Chen, Qiang AU - He, Xiongxiong PY - 2026 DA - 2026/03/17 TI - A Safety-Critical Control Scheme for Spacecraft Relative Motion Tracking Based on the Fully Actuated System Approach and Offline QP Solutions JO - ICCK Transactions on Sensing, Communication, and Control T2 - ICCK Transactions on Sensing, Communication, and Control JF - ICCK Transactions on Sensing, Communication, and Control VL - 3 IS - 1 SP - 54 EP - 63 DO - 10.62762/TSCC.2025.553018 UR - https://www.icck.org/article/abs/TSCC.2025.553018 KW - control barrier function KW - fully actuated system approach KW - safety-critical control KW - spacecraft relative motion tracking AB - A safety-critical control scheme based on fully actuated system approach (FASA) framework is developed for spacecraft relative motion tracking under external disturbances and multiple forbidden regions. For tracking performance, the nominal controller is designed by using the FASA framework, such that the controller design process can be simplified. For safety constraints, a disturbance-tolerant control barrier function incorporating low-pass filtered disturbance compensation is introduced to mitigate interference effects. Furthermore, a sequential correction strategy is developed to resolve safety constraints through offline-computed quadratic program (QP) solutions, which can eliminate dependence on real-time optimization of the QP solver. Theoretical analysis confirms that the proposed control scheme simultaneously guarantees collision avoidance and the spacecraft relative motion tracking. Numerical simulations further validate the effectiveness of the proposed approach. SN - 3068-9287 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Yang2026A,
author = {Xiaoyu Yang and Qiang Chen and Xiongxiong He},
title = {A Safety-Critical Control Scheme for Spacecraft Relative Motion Tracking Based on the Fully Actuated System Approach and Offline QP Solutions},
journal = {ICCK Transactions on Sensing, Communication, and Control},
year = {2026},
volume = {3},
number = {1},
pages = {54-63},
doi = {10.62762/TSCC.2025.553018},
url = {https://www.icck.org/article/abs/TSCC.2025.553018},
abstract = {A safety-critical control scheme based on fully actuated system approach (FASA) framework is developed for spacecraft relative motion tracking under external disturbances and multiple forbidden regions. For tracking performance, the nominal controller is designed by using the FASA framework, such that the controller design process can be simplified. For safety constraints, a disturbance-tolerant control barrier function incorporating low-pass filtered disturbance compensation is introduced to mitigate interference effects. Furthermore, a sequential correction strategy is developed to resolve safety constraints through offline-computed quadratic program (QP) solutions, which can eliminate dependence on real-time optimization of the QP solver. Theoretical analysis confirms that the proposed control scheme simultaneously guarantees collision avoidance and the spacecraft relative motion tracking. Numerical simulations further validate the effectiveness of the proposed approach.},
keywords = {control barrier function, fully actuated system approach, safety-critical control, spacecraft relative motion tracking},
issn = {3068-9287},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Portico
