ICCK Transactions on Intelligent Systematics | Volume 3, Issue 2: 94-107, 2026 | DOI: 10.62762/TIS.2025.566749
Abstract
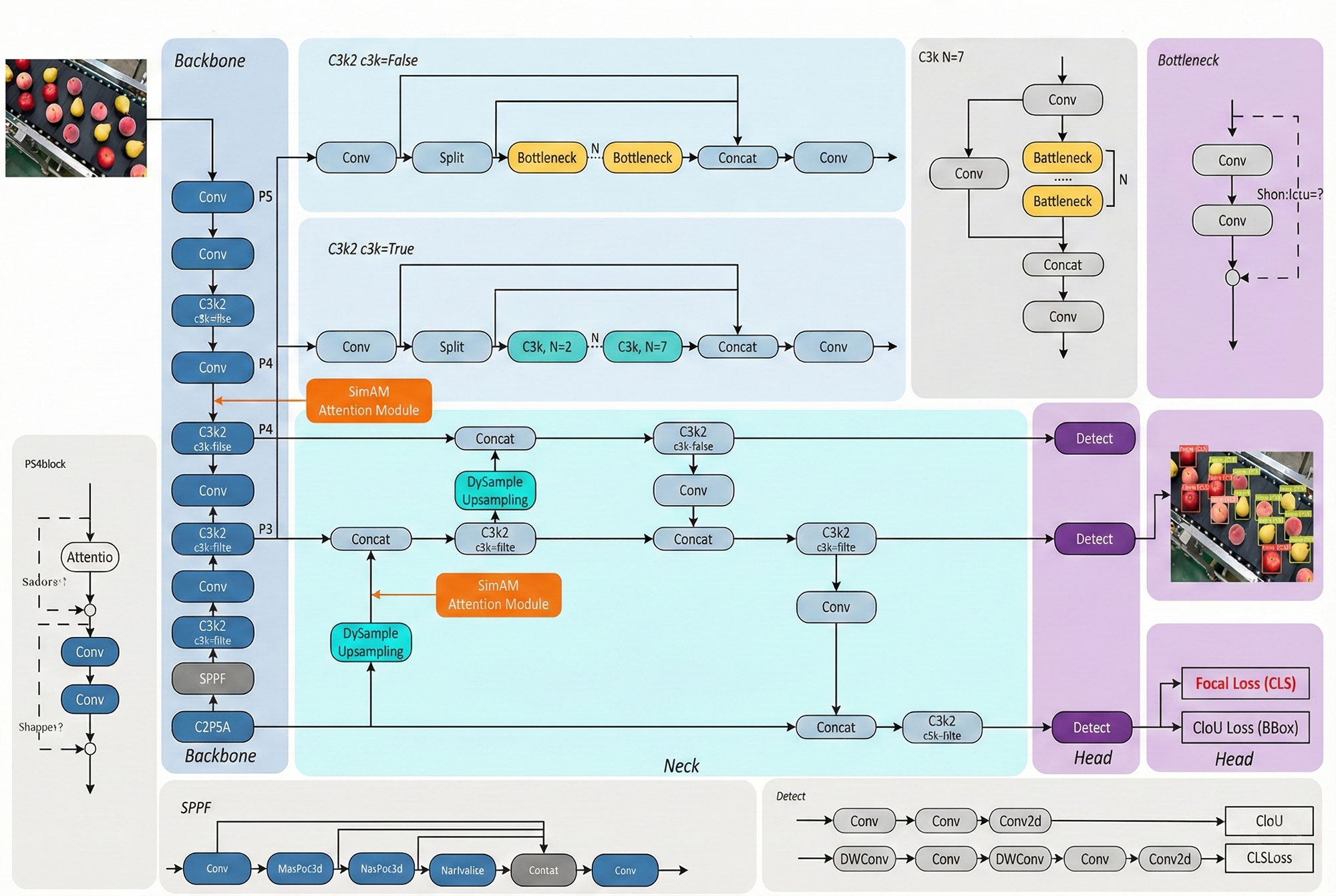
To address key challenges in post-harvest fruit grading—namely the difficulty of distinguishing visually similar varieties, the invisibility of internal quality, and mechanical damage during grasping—this study develops an intelligent robotic grading system that integrates advanced computer vision, Near-Infrared (NIR) spectroscopy, and flexible force-controlled grasping. First, an improved object detection algorithm, YOLOv11-TFE, is proposed to mitigate visual confusion between Qixia Fuji apples and Beijing Pinggu peaches and to handle the irregular geometry of Nanshui pears. By embedding the parameter-free SimAM attention mechanism into the backbone to explicitly enhance and decouple su... More >
Graphical Abstract