A Robotic System for Fine-Grained Non-Destructive Grading of Visually Similar Fruits Based on Improved YOLOv11 and Multi-modal Perception
Article Information
Abstract
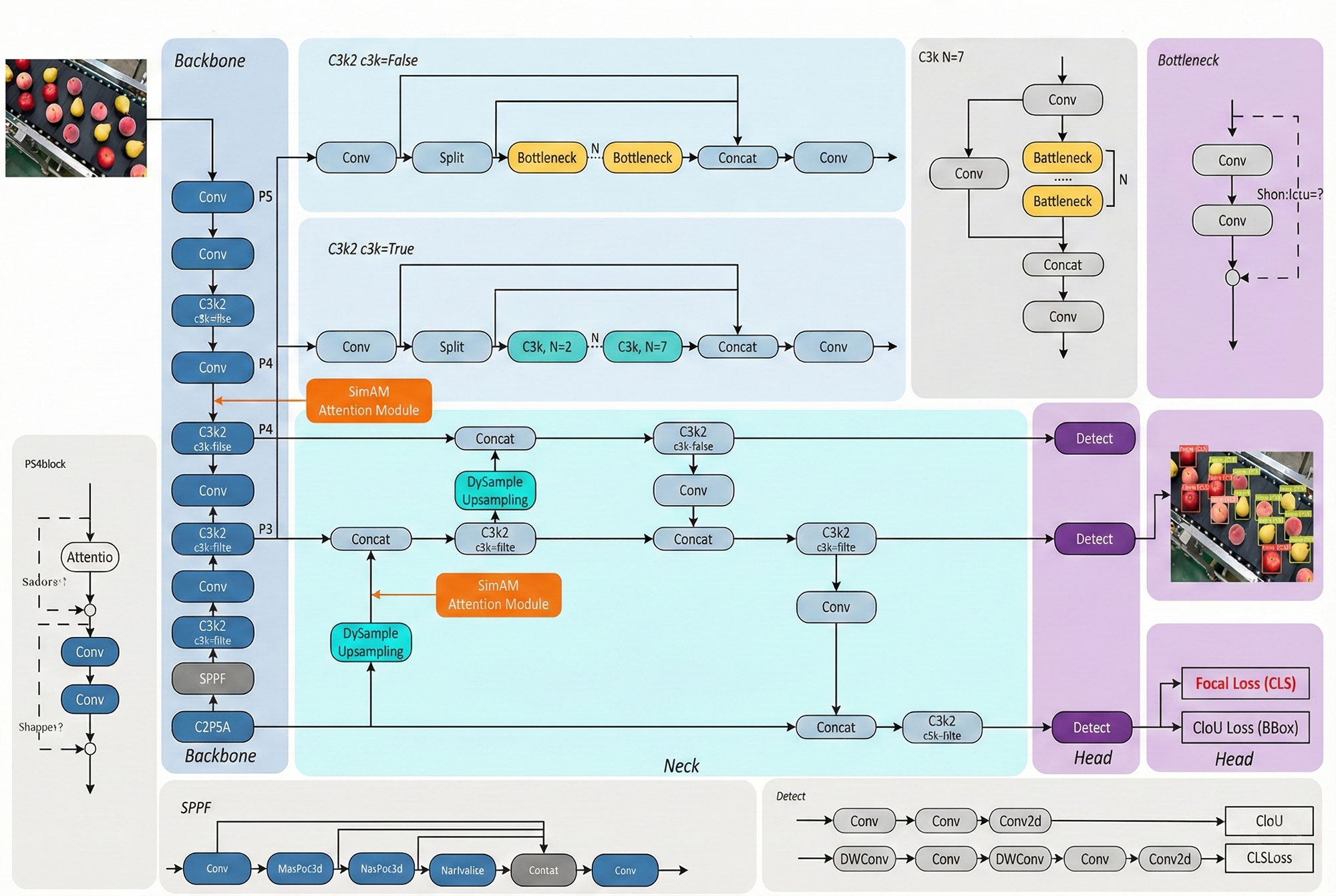
To address key challenges in post-harvest fruit grading—namely the difficulty of distinguishing visually similar varieties, the invisibility of internal quality, and mechanical damage during grasping—this study develops an intelligent robotic grading system that integrates advanced computer vision, Near-Infrared (NIR) spectroscopy, and flexible force-controlled grasping. First, an improved object detection algorithm, YOLOv11-TFE, is proposed to mitigate visual confusion between Qixia Fuji apples and Beijing Pinggu peaches and to handle the irregular geometry of Nanshui pears. By embedding the parameter-free SimAM attention mechanism into the backbone to explicitly enhance and decouple surface texture features (gloss versus tomentum) and incorporating the DySample upsampling operator to better preserve complex edge information, the discriminative capability of the detector is significantly improved. Second, a non-destructive internal quality detection module based on NIR spectroscopy (650–1100 nm) is constructed. Through the optimization of preprocessing strategies—specifically Improved Derivative Correction (IDC) and Standard Normal Variate (SNV)—robust PLSR models for soluble solids content (SSC) prediction are established for fruits with differing skin textures. Finally, a dynamic actuation unit for a biomimetic flexible gripper has been designed to achieve non-destructive sorting under continuous flow conditions. Experimental results show that the improved visual algorithm achieves an average [email protected] of 94.6%, with detection accuracies for apples and peaches reaching 96.0% and 97.8%, respectively, markedly reducing inter-class confusion. The root mean square error of prediction (RMSEP) for SSC across all three fruit varieties is kept within 0.65%. System-level validation further demonstrates an overall dynamic grasping success rate of 91.7% without causing visible damage. Overall, the proposed system achieves precise and comprehensive grading for multiple high-value fruit varieties.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
AI Use Statement
Ethical Approval and Consent to Participate
References
- Mukhiddinov, M., Muminov, A., & Cho, J. (2022). Improved classification approach for fruits and vegetables freshness based on deep learning. Sensors, 22(21), 8192.
[CrossRef] [Google Scholar] - Arunima, P. L., Gopinath, P. P., Lekshmi, P. G., & Esakkimuthu, M. (2024). Digital assessment of post-harvest Nendran banana for faster grading: CNN-based ripeness classification model. Postharvest Biology and Technology, 214, 112972.
[CrossRef] [Google Scholar] - Ghonimy, M., Alayouni, R., Alshehry, G., Barakat, H., & Ibrahim, M. M. (2025). Integrated Physical–Mechanical Characterization of Fruits for Enhancing Post-Harvest Quality and Handling Efficiency. Foods, 14(14), 2521.
[CrossRef] [Google Scholar] - Kang, H., Zhou, H., Wang, X., & Chen, C. (2020). Real-time fruit recognition and grasping estimation for robotic apple harvesting. Sensors, 20(19), 5670.
[CrossRef] [Google Scholar] - Tang, Y., Huang, W., Tan, Z., Chen, W., Wei, S., Zhuang, J., ... & Ren, J. (2025). Citrus fruit detection based on an improved YOLOv5 under natural orchard conditions. International Journal of Agricultural and Biological Engineering, 18(3), 176-185.
[CrossRef] [Google Scholar] - Wang, X., Huang, Y., Wei, S., Xu, W., Zhu, X., Mu, J., & Chen, X. (2025). ELD-YOLO: A lightweight framework for detecting occluded mandarin fruits in plant research. Plants, 14(11), 1729.
[CrossRef] [Google Scholar] - Yu, H., Qian, C., Chen, Z., Chen, J., & Zhao, Y. (2025). Ripe-Detection: A lightweight method for strawberry ripeness detection. Agronomy, 15(7), 1645.
[CrossRef] [Google Scholar] - Zhang, Z., Cheng, H., Geng, W., & Guan, J. (2025). Research advances in hyperspectral imaging technology for fruit quality assessment. Smart Agriculture, 7(5), 52–66.
[CrossRef] [Google Scholar] - Jiang, X., Zhu, M., Yao, J., Zhang, Y., & Liu, Y. (2022). Calibration of near infrared spectroscopy of apples with different fruit sizes to improve soluble solids content model performance. Foods, 11(13), 1923.
[CrossRef] [Google Scholar] - Zong, H., Tian, S., Liu, Z., Guo, B., Wang, Y., Ren, J., ... & Zhang, E. (2025). Dual-branch feature-enhanced neural network for apple SSC estimation from hyperspectral imaging. Journal of Food Composition and Analysis, 108700.
[CrossRef] [Google Scholar] - Guo, Z., Zhai, L., Zou, Y., Sun, C., Jayan, H., El-Seedi, H. R., ... & Zou, X. (2024). Comparative study of Vis/NIR reflectance and transmittance method for on-line detection of strawberry SSC. Computers and Electronics in Agriculture, 218, 108744.
[CrossRef] [Google Scholar] - He, W., Huang, W., Li, Y., Latinović, N., Zhang, Y., & Zhang, X. (2025). Multimodal information fusion and precision harvesting system for fruit growth driven by flexible optoelectronic sensing and hierarchical attention networks. Computers and Electronics in Agriculture, 238, 110784.
[CrossRef] [Google Scholar] - Huang, W., Xia, J., Wang, Y., Jin, X., Zhu, H., & Zhang, X. (2024). Flexible multimode sensors based on hierarchical microstructures enable non-destructive grading of fruits in cold chain logistics. Materials Today Sustainability, 25, 100691.
[CrossRef] [Google Scholar] - Ren, S., He, K., Girshick, R., & Sun, J. (2016). Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE transactions on pattern analysis and machine intelligence, 39(6), 1137-1149.
[CrossRef] [Google Scholar] - Redmon, J., & Farhadi, A. (2018). Yolov3: An incremental improvement. arXiv preprint arXiv:1804.02767.
[Google Scholar] - Teng, H., Sun, F., Wu, H., Lv, D., Lv, Q., Feng, F., ... & Li, X. (2025). DS-YOLO: A Lightweight Strawberry Fruit Detection Algorithm. Agronomy, 15(9), 2226.
[CrossRef] [Google Scholar] - Liao, Y., Li, L., Xiao, H., Xu, F., Shan, B., & Yin, H. (2025). YOLO-MECD: Citrus detection algorithm based on YOLOv11. Agronomy, 15(3), 687.
[CrossRef] [Google Scholar] - Khanam, R., & Hussain, M. (2024). Yolov11: An overview of the key architectural enhancements. arXiv preprint arXiv:2410.17725.
[Google Scholar] - Liu, Y., Wang, Q., Gao, X., & Xie, A. (2019). Total phenolic content prediction in Flos Lonicerae using hyperspectral imaging combined with wavelengths selection methods. Journal of Food Process Engineering, 42(6), e13224.
[CrossRef] [Google Scholar] - Cheng, J. H., & Sun, D. W. (2017). Partial least squares regression (PLSR) applied to NIR and HSI spectral data modeling to predict chemical properties of fish muscle. Food engineering reviews, 9(1), 36-49.
[CrossRef] [Google Scholar]
Cite This Article
TY - JOUR AU - Ma, Zhenhao AU - Zhang, Bin AU - Yin, Tianzhen PY - 2026 DA - 2026/04/17 TI - A Robotic System for Fine-Grained Non-Destructive Grading of Visually Similar Fruits Based on Improved YOLOv11 and Multi-modal Perception JO - ICCK Transactions on Intelligent Systematics T2 - ICCK Transactions on Intelligent Systematics JF - ICCK Transactions on Intelligent Systematics VL - 3 IS - 2 SP - 94 EP - 107 DO - 10.62762/TIS.2025.566749 UR - https://www.icck.org/article/abs/TIS.2025.566749 KW - fruit grading robot KW - YOLOv11 KW - fine-grained classification KW - NIR spectroscopy KW - flexible grasping AB - To address key challenges in post-harvest fruit grading—namely the difficulty of distinguishing visually similar varieties, the invisibility of internal quality, and mechanical damage during grasping—this study develops an intelligent robotic grading system that integrates advanced computer vision, Near-Infrared (NIR) spectroscopy, and flexible force-controlled grasping. First, an improved object detection algorithm, YOLOv11-TFE, is proposed to mitigate visual confusion between Qixia Fuji apples and Beijing Pinggu peaches and to handle the irregular geometry of Nanshui pears. By embedding the parameter-free SimAM attention mechanism into the backbone to explicitly enhance and decouple surface texture features (gloss versus tomentum) and incorporating the DySample upsampling operator to better preserve complex edge information, the discriminative capability of the detector is significantly improved. Second, a non-destructive internal quality detection module based on NIR spectroscopy (650–1100 nm) is constructed. Through the optimization of preprocessing strategies—specifically Improved Derivative Correction (IDC) and Standard Normal Variate (SNV)—robust PLSR models for soluble solids content (SSC) prediction are established for fruits with differing skin textures. Finally, a dynamic actuation unit for a biomimetic flexible gripper has been designed to achieve non-destructive sorting under continuous flow conditions. Experimental results show that the improved visual algorithm achieves an average [email protected] of 94.6%, with detection accuracies for apples and peaches reaching 96.0% and 97.8%, respectively, markedly reducing inter-class confusion. The root mean square error of prediction (RMSEP) for SSC across all three fruit varieties is kept within 0.65%. System-level validation further demonstrates an overall dynamic grasping success rate of 91.7% without causing visible damage. Overall, the proposed system achieves precise and comprehensive grading for multiple high-value fruit varieties. SN - 3068-5079 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Ma2026A,
author = {Zhenhao Ma and Bin Zhang and Tianzhen Yin},
title = {A Robotic System for Fine-Grained Non-Destructive Grading of Visually Similar Fruits Based on Improved YOLOv11 and Multi-modal Perception},
journal = {ICCK Transactions on Intelligent Systematics},
year = {2026},
volume = {3},
number = {2},
pages = {94-107},
doi = {10.62762/TIS.2025.566749},
url = {https://www.icck.org/article/abs/TIS.2025.566749},
abstract = {To address key challenges in post-harvest fruit grading—namely the difficulty of distinguishing visually similar varieties, the invisibility of internal quality, and mechanical damage during grasping—this study develops an intelligent robotic grading system that integrates advanced computer vision, Near-Infrared (NIR) spectroscopy, and flexible force-controlled grasping. First, an improved object detection algorithm, YOLOv11-TFE, is proposed to mitigate visual confusion between Qixia Fuji apples and Beijing Pinggu peaches and to handle the irregular geometry of Nanshui pears. By embedding the parameter-free SimAM attention mechanism into the backbone to explicitly enhance and decouple surface texture features (gloss versus tomentum) and incorporating the DySample upsampling operator to better preserve complex edge information, the discriminative capability of the detector is significantly improved. Second, a non-destructive internal quality detection module based on NIR spectroscopy (650–1100 nm) is constructed. Through the optimization of preprocessing strategies—specifically Improved Derivative Correction (IDC) and Standard Normal Variate (SNV)—robust PLSR models for soluble solids content (SSC) prediction are established for fruits with differing skin textures. Finally, a dynamic actuation unit for a biomimetic flexible gripper has been designed to achieve non-destructive sorting under continuous flow conditions. Experimental results show that the improved visual algorithm achieves an average [email protected] of 94.6\%, with detection accuracies for apples and peaches reaching 96.0\% and 97.8\%, respectively, markedly reducing inter-class confusion. The root mean square error of prediction (RMSEP) for SSC across all three fruit varieties is kept within 0.65\%. System-level validation further demonstrates an overall dynamic grasping success rate of 91.7\% without causing visible damage. Overall, the proposed system achieves precise and comprehensive grading for multiple high-value fruit varieties.},
keywords = {fruit grading robot, YOLOv11, fine-grained classification, NIR spectroscopy, flexible grasping},
issn = {3068-5079},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Portico

