by
ICCK Transactions on Intelligent Cyber-Physical Systems | Volume 1, Issue 1: 26-37, 2026 | DOI: 10.62762/TICPS.2026.746937
Abstract
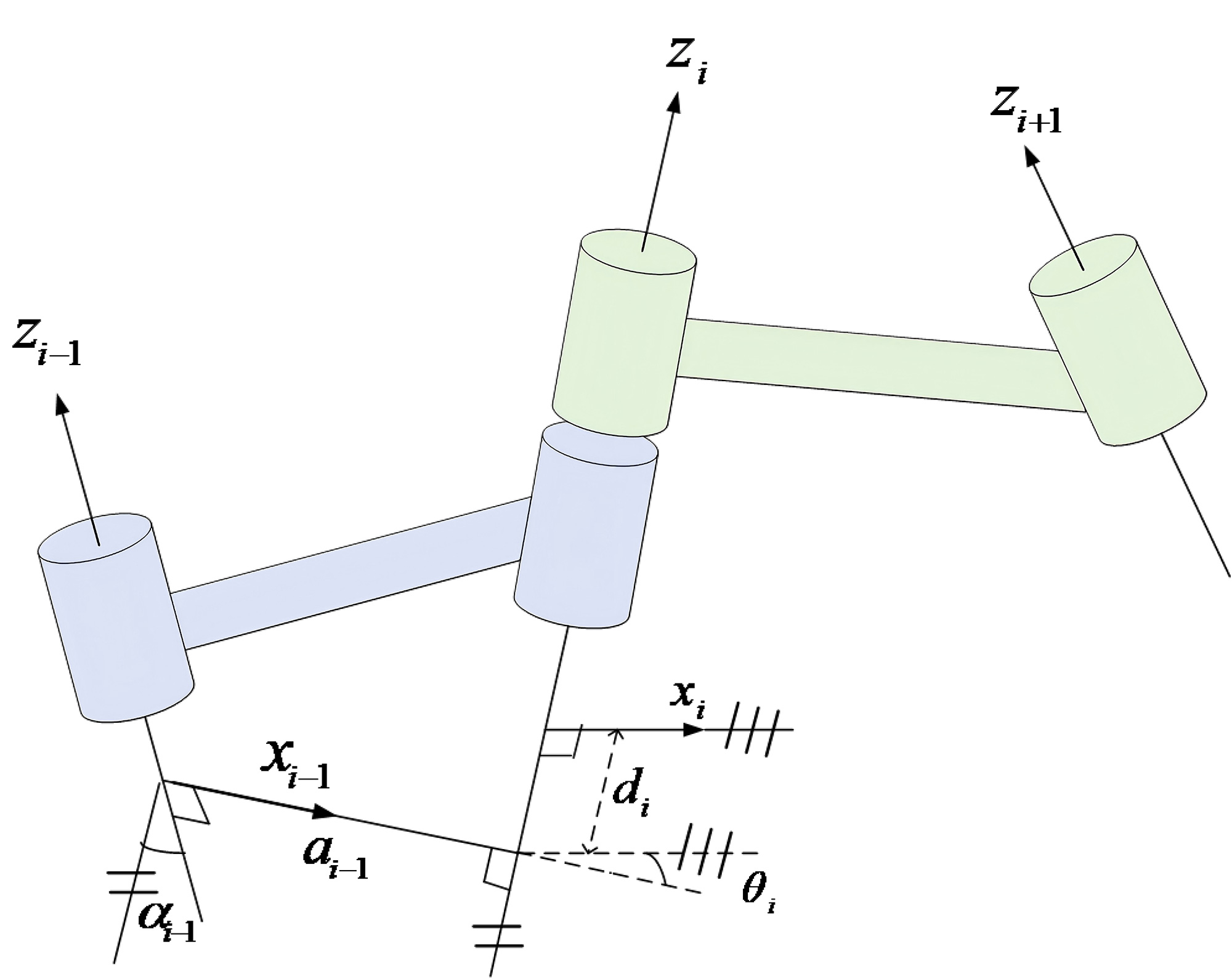
This paper establishes an analytical kinematic model for a three-degree-of-freedom planar manipulator with three serial links, and validates it through MATLAB numerical simulations and SolidWorks-ADAMS co-simulation. Based on the mechanism topology and the Denavit-Hartenberg (D-H) parameter method, coordinate frames are assigned, and homogeneous transformation modeling is performed, leading to a closed-form forward kinematics expression for the end-effector pose. By combining wrist-point decomposition, geometric approaches, and the law of cosines, an analytical inverse kinematics solution is derived, and the characteristics of multiple solution configurations are discussed. The simulation re... More >
Graphical Abstract