ICCK Transactions on Intelligent Cyber-Physical Systems
ISSN: pending (Online)
Email: [email protected]
 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue

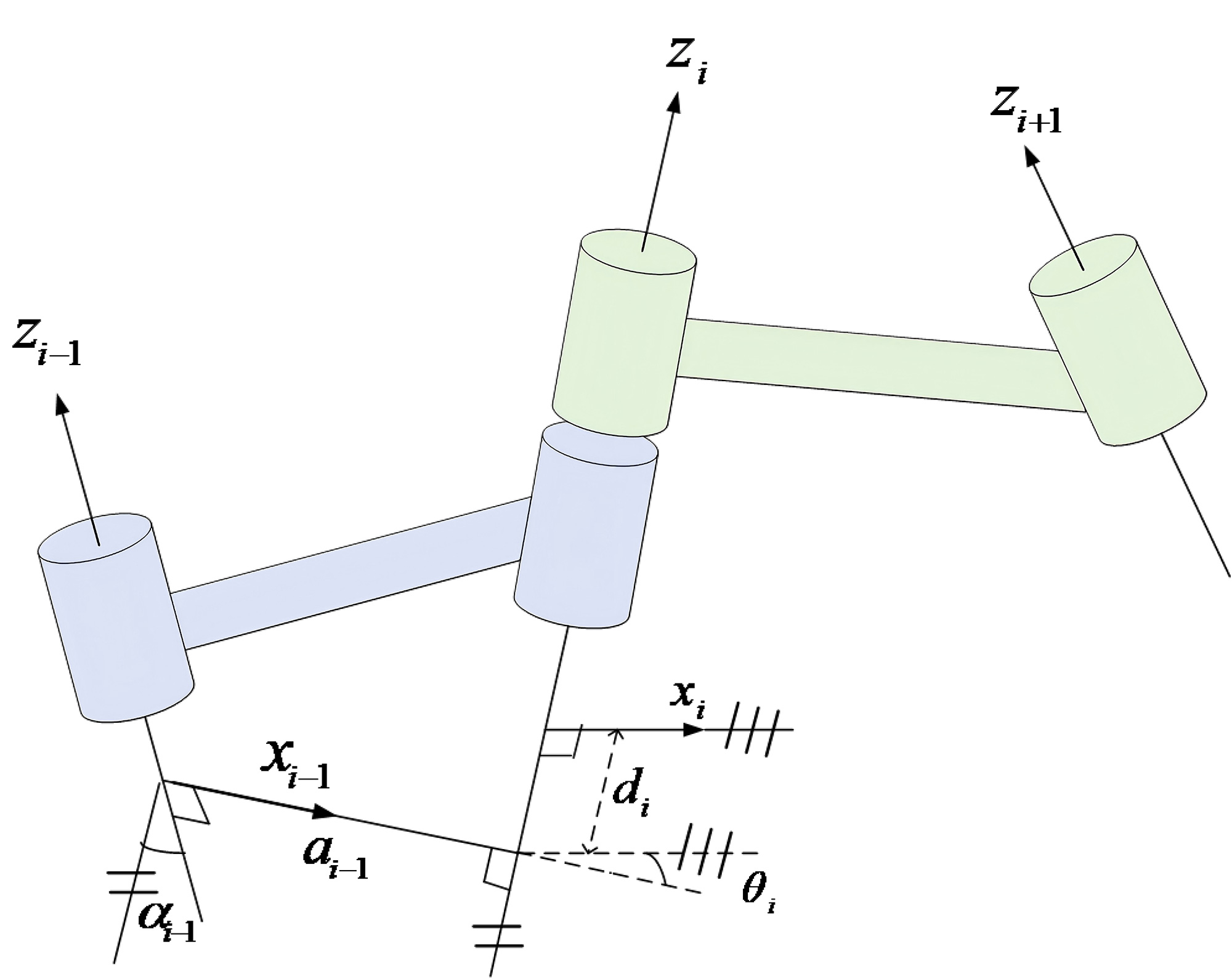
TY - JOUR AU - Jiang, Nuoyu PY - 2026 DA - 2026/02/13 TI - Analytical Kinematic Modeling and Simulation Verification of a Three-Link Planar Manipulator JO - ICCK Transactions on Intelligent Cyber-Physical Systems T2 - ICCK Transactions on Intelligent Cyber-Physical Systems JF - ICCK Transactions on Intelligent Cyber-Physical Systems VL - 1 IS - 1 SP - 26 EP - 37 DO - 10.62762/TICPS.2026.746937 UR - https://www.icck.org/article/abs/TICPS.2026.746937 KW - three-link planar manipulator KW - D-H parameter method KW - forward kinematics KW - analytical inverse kinematics KW - MATLAB and ADAMS simulation validation AB - This paper establishes an analytical kinematic model for a three-degree-of-freedom planar manipulator with three serial links, and validates it through MATLAB numerical simulations and SolidWorks-ADAMS co-simulation. Based on the mechanism topology and the Denavit-Hartenberg (D-H) parameter method, coordinate frames are assigned, and homogeneous transformation modeling is performed, leading to a closed-form forward kinematics expression for the end-effector pose. By combining wrist-point decomposition, geometric approaches, and the law of cosines, an analytical inverse kinematics solution is derived, and the characteristics of multiple solution configurations are discussed. The simulation results show that the analytical forward and inverse kinematics are consistent with the numerical outputs from the Robotics Toolbox, and the inverse solution can reliably recover the joint angles. In the ADAMS simulation, joint responses follow a sinusoidal driving law, and the end-effector trajectory is continuous and smooth, satisfying the motion characteristics of planar mechanisms. These results confirm the correctness and engineering applicability of the proposed model. SN - pending PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Jiang2026Analytical,
author = {Nuoyu Jiang},
title = {Analytical Kinematic Modeling and Simulation Verification of a Three-Link Planar Manipulator},
journal = {ICCK Transactions on Intelligent Cyber-Physical Systems},
year = {2026},
volume = {1},
number = {1},
pages = {26-37},
doi = {10.62762/TICPS.2026.746937},
url = {https://www.icck.org/article/abs/TICPS.2026.746937},
abstract = {This paper establishes an analytical kinematic model for a three-degree-of-freedom planar manipulator with three serial links, and validates it through MATLAB numerical simulations and SolidWorks-ADAMS co-simulation. Based on the mechanism topology and the Denavit-Hartenberg (D-H) parameter method, coordinate frames are assigned, and homogeneous transformation modeling is performed, leading to a closed-form forward kinematics expression for the end-effector pose. By combining wrist-point decomposition, geometric approaches, and the law of cosines, an analytical inverse kinematics solution is derived, and the characteristics of multiple solution configurations are discussed. The simulation results show that the analytical forward and inverse kinematics are consistent with the numerical outputs from the Robotics Toolbox, and the inverse solution can reliably recover the joint angles. In the ADAMS simulation, joint responses follow a sinusoidal driving law, and the end-effector trajectory is continuous and smooth, satisfying the motion characteristics of planar mechanisms. These results confirm the correctness and engineering applicability of the proposed model.},
keywords = {three-link planar manipulator, D-H parameter method, forward kinematics, analytical inverse kinematics, MATLAB and ADAMS simulation validation},
issn = {pending},
publisher = {Institute of Central Computation and Knowledge}
}
ICCK Transactions on Intelligent Cyber-Physical Systems
ISSN: pending (Online)
Email: [email protected]

Portico
All published articles are preserved here permanently:
https://www.portico.org/publishers/icck/