ICCK Transactions on Machine Intelligence | Volume 2, Issue 2: 88-99, 2026 | DOI: 10.62762/TMI.2025.759110
Abstract
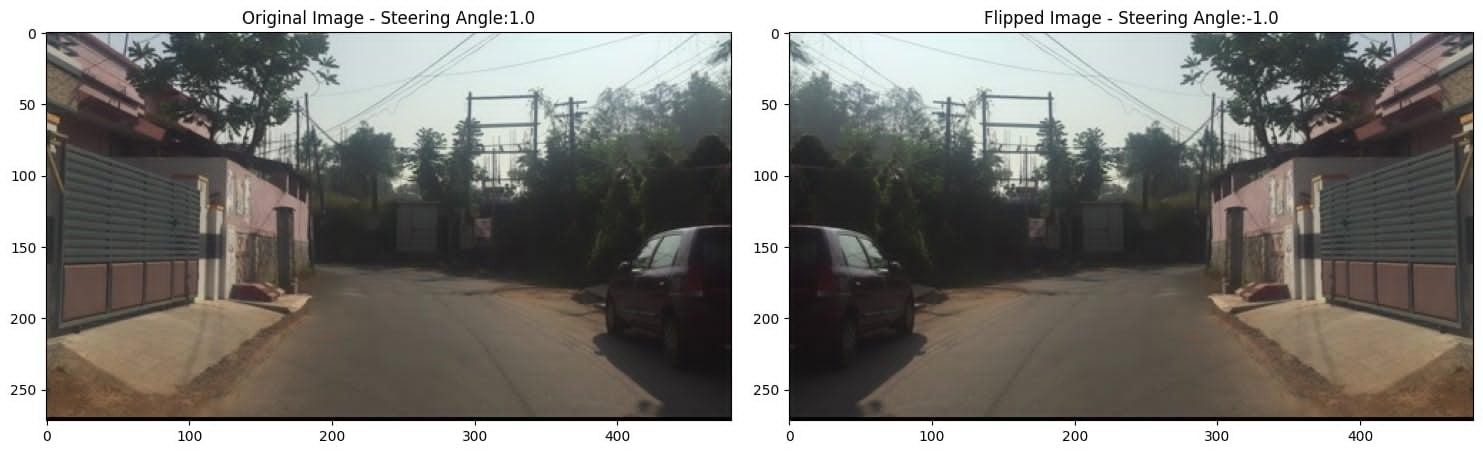
This study investigates convolutional neural network (CNN) architectures for predicting steering angles in self-driving vehicles navigating unstructured roads, using road-facing image data. Two complementary experiments are conducted. First, the impact of three activation functions—Exponential Linear Unit (ELU), Rectified Linear Unit (ReLU), and Leaky ReLU—is evaluated on a baseline CNN model. Trained on 14,754 images and validated on 3,585 images, the model with ELU activation achieves the lowest validation mean squared error (MSE) compared to ReLU and Leaky ReLU, demonstrating superior convergence and generalization. Second, the effect of model complexity is examined using ELU activati... More >
Graphical Abstract