Intelligent Logistics Management Robot Path Planning Algorithm Integrating Transformer and GCN Network




Article Information
Abstract
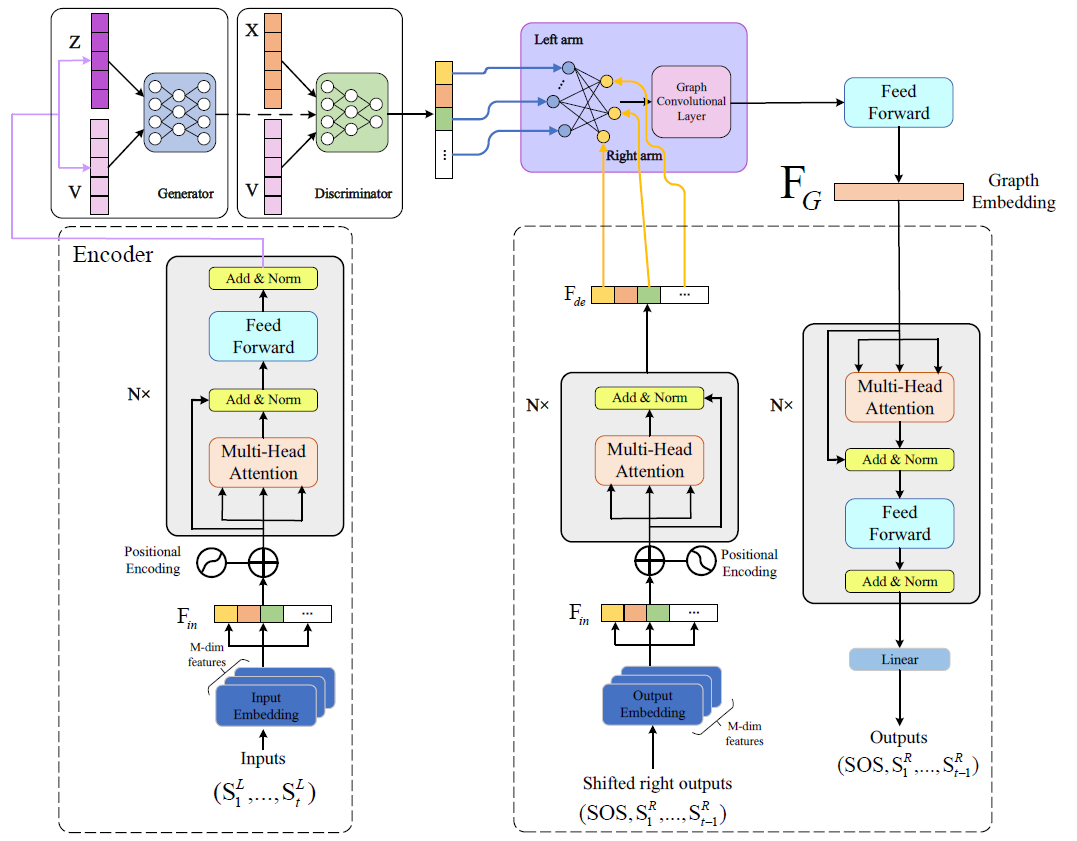
This study focuses on optimizing multimodal robot route planning in intelligent logistics management by integrating Transformer models, Graph Neural Networks (GNNs), and Generative Adversarial Networks (GANs). Using a graph structure representing map information, cargo distribution, and robot states, spatial and resource constraints are considered to optimize paths. Extensive simulations based on real logistics datasets demonstrate significant improvements over traditional methods, with an average 15\% reduction in path length, 20% improvement in time efficiency, and 10% reduction in energy consumption. These results underscore the effectiveness and superiority of the proposed multimodal path planning algorithm, offering robust support for advancing intelligent logistics management.
Graphical Abstract
Keywords
Funding
References
- Saunderson, S., & Nejat, G. (2019). How robots influence humans: A survey of nonverbal communication in social human–robot interaction. International Journal of Social Robotics, 11(4), 575-608.
[Google Scholar] - Ding, Y., Jin, M., Li, S., & Feng, D. (2021). Smart logistics based on the internet of things technology: an overview. International Journal of Logistics Research and Applications, 24(4), 323-345.
[Google Scholar] - Peng, X., Xu, Q., Feng, Z., Zhao, H., Tan, L., Zhou, Y., Zhang, Z., Gong, C., & Zheng, Y. (2024). Automatic News Generation and Fact-Checking System Based on Language Processing. arXiv preprint arXiv:2405.10492.
[Google Scholar] - Singandhupe, A., & La, H. M. (2019, February). A review of slam techniques and security in autonomous driving. In 2019 third IEEE international conference on robotic computing (IRC) (pp. 602-607). IEEE.
[Google Scholar] - Wang, C., Sui, M., Sun, D., Zhang, Z., & Zhou, Y. (2024, May). Theoretical analysis of meta reinforcement learning: Generalization bounds and convergence guarantees. In Proceedings of the International Conference on Modeling, Natural Language Processing and Machine Learning (pp. 153-159).
[Google Scholar] - Zou, H., Zhang, M., Farzamkia, S., & Huang, A. Q. (2024, February). Simplified Fixed Frequency Phase Shift Modulation for A Novel Single-Stage Single Phase Series-Resonant AC-DC Converter. In 2024 IEEE Applied Power Electronics Conference and Exposition (APEC) (pp. 1261-1268). IEEE.
[Google Scholar] - Bucker, A., Figueredo, L., Haddadinl, S., Kapoor, A., Ma, S., & Bonatti, R. (2022, October). Reshaping robot trajectories using natural language commands: A study of multi-modal data alignment using transformers. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 978-984). IEEE.
[Google Scholar] - Cai, X., Ning, H., Dhelim, S., Zhou, R., Zhang, T., Xu, Y., & Wan, Y. (2021). Robot and its living space: A roadmap for robot development based on the view of living space. Digital Communications and Networks, 7(4), 505-517.
[Google Scholar] - Radosavovic, I., Xiao, T., Zhang, B., Darrell, T., Malik, J., & Sreenath, K. (2024). Real-world humanoid locomotion with reinforcement learning. Science Robotics, 9(89), eadi9579.
[Google Scholar] - Ma, H. (2022). Graph-based multi-robot path finding and planning. Current Robotics Reports, 3(3), 77-84.
[Google Scholar] - Li, J., Harabor, D., Stuckey, P. J., Ma, H., Gange, G., & Koenig, S. (2021). Pairwise symmetry reasoning for multi-agent path finding search. Artificial Intelligence, 301, 103574.
[Google Scholar] - Guo, Z., Zhang, X., Mu, H., Heng, W., Liu, Z., Wei, Y., & Sun, J. (2020). Single path one-shot neural architecture search with uniform sampling. Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part XVI 16,
[Google Scholar] - Ajeil, F. H., Ibraheem, I. K., Azar, A. T., & Humaidi, A. J. (2020). Grid-based mobile robot path planning using aging-based ant colony optimization algorithm in static and dynamic environments. Sensors, 20(7), 1880.
[Google Scholar] - Liu, L., Xu, W., Fu, H., Qian, S., Yu, Q., Han, Y., & Lu, C. (2022). Akb-48: A real-world articulated object knowledge base. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (pp. 14809-14818).
[Google Scholar] - Zhou, J., Cui, G., Hu, S., Zhang, Z., Yang, C., Liu, Z., Wang, L., Li, C., & Sun, M. (2020). Graph neural networks: A review of methods and applications. AI open, 1, 57-81.
[Google Scholar] - Stern, R., Sturtevant, N., Felner, A., Koenig, S., Ma, H., Walker, T., ... & Boyarski, E. (2019). Multi-agent pathfinding: Definitions, variants, and benchmarks. In Proceedings of the International Symposium on Combinatorial Search (Vol. 10, No. 1, pp. 151-158).
[Google Scholar] - Miao, C., Chen, G., Yan, C., & Wu, Y. (2021). Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Computers & Industrial Engineering, 156, 107230.
[Google Scholar] - Chen, J., Ling, F., Zhang, Y., You, T., Liu, Y., & Du, X. (2022). Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system. Swarm and Evolutionary Computation, 69, 101005.
[Google Scholar] - Chen, J., Zhang, Y., Wu, L., You, T., & Ning, X. (2021). An adaptive clustering-based algorithm for automatic path planning of heterogeneous UAVs. IEEE Transactions on Intelligent Transportation Systems, 23(9), 16842-16853.
[Google Scholar] - Chen, J., Li, T., Zhang, Y., You, T., Lu, Y., Tiwari, P., & Kumar, N. (2023). Global-and-local attention-based reinforcement learning for cooperative behaviour control of multiple UAVs.IEEE Transactions on Vehicular Technology, 73(3), 4194-4206.
[Google Scholar] - Zhu, X., Cheng, D., Zhang, Z., Lin, S., & Dai, J. (2019). An empirical study of spatial attention mechanisms in deep networks. In Proceedings of the IEEE/CVF international conference on computer vision (pp. 6688-6697).
[Google Scholar] - Qiu, D., & Yang, B. (2022). Text summarization based on multi-head self-attention mechanism and pointer network. Complex & Intelligent Systems, 1-13.
[Google Scholar] - Jais, I. K. M., Ismail, A. R., & Nisa, S. Q. (2019). Adam optimization algorithm for wide and deep neural network. Knowl. Eng. Data Sci., 2(1), 41-46.
[Google Scholar] - Aggadversarial arwal, A., Mittal, M., & Battineni, G. (2021). Generative adversarial network: An overview of theory and applications. International Journal of Information Management Data Insights, 1(1), 100004.
[Google Scholar] - Tse, S. K., Wong, Y. B., Tang, J., Duan, P., Leung, S. W. W., & Shi, L. (2021, May). Relative state formation-based warehouse multi-robot collaborative parcel moving. In 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS) (pp. 375-380). IEEE.
[Google Scholar] - Karnan, H., Nair, A., Xiao, X., Warnell, G., Pirk, S., Toshev, A., Hart, J., Biswas, J., & Stone, P. (2022). Socially compliant navigation dataset (scand): A large-scale dataset of demonstrations for social navigation. IEEE Robotics and Automation Letters, 7(4), 11807-11814.
[Google Scholar] - Zhang, H.-y., Lin, W.-m., & Chen, A.-x. (2018). Path planning for the mobile robot: A review. Symmetry, 10(10), 450.
[Google Scholar] - Bae, H., Kim, G., Kim, J., Qian, D., & Lee, S. (2019). Multi-robot path planning method using reinforcement learning. Applied sciences, 9(15), 3057.
[Google Scholar] - Wang, X., Liu, Z., & Liu, J. (2023, May). Mobile robot path planning based on an improved A* algorithm. In International conference on computer graphics, artificial intelligence, and data processing (ICCAID 2022) (Vol. 12604, pp. 1093-1098). SPIE.
[Google Scholar] - Yang, Y., Juntao, L., & Lingling, P. (2020). Multi-robot path planning based on a deep reinforcement learning DQN algorithm. CAAI Transactions on Intelligence Technology, 5(3), 177-183.
[Google Scholar] - Akka, K., & Khaber, F. (2018). Mobile robot path planning using an improved ant colony optimization. International Journal of Advanced Robotic Systems, 15(3), 1729881418774673.
[Google Scholar] - Low, E. S., Ong, P., & Cheah, K. C. (2019). Solving the optimal path planning of a mobile robot using improved Q-learning. Robotics and Autonomous Systems, 115, 143-161.
[Google Scholar]
Cite This Article
TY - JOUR AU - Luo, Hao AU - Wei, Jianjun AU - Zhao, Shuchen AU - Liang, Ankai AU - Xu, Zhongjin AU - Jiang, Ruxue PY - 2024 DA - 2024/12/31 TI - Intelligent Logistics Management Robot Path Planning Algorithm Integrating Transformer and GCN Network JO - ICCK Transactions on Internet of Things T2 - ICCK Transactions on Internet of Things JF - ICCK Transactions on Internet of Things VL - 2 IS - 4 SP - 95 EP - 112 DO - 10.62762/TIOT.2024.918236 UR - https://www.icck.org/article/abs/TIOT.2024.918236 KW - multimodal robots KW - deep path planning KW - transformer model KW - graph neural network KW - generative adversarial network AB - This study focuses on optimizing multimodal robot route planning in intelligent logistics management by integrating Transformer models, Graph Neural Networks (GNNs), and Generative Adversarial Networks (GANs). Using a graph structure representing map information, cargo distribution, and robot states, spatial and resource constraints are considered to optimize paths. Extensive simulations based on real logistics datasets demonstrate significant improvements over traditional methods, with an average 15\% reduction in path length, 20% improvement in time efficiency, and 10% reduction in energy consumption. These results underscore the effectiveness and superiority of the proposed multimodal path planning algorithm, offering robust support for advancing intelligent logistics management. SN - pending PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Luo2024Intelligen,
author = {Hao Luo and Jianjun Wei and Shuchen Zhao and Ankai Liang and Zhongjin Xu and Ruxue Jiang},
title = {Intelligent Logistics Management Robot Path Planning Algorithm Integrating Transformer and GCN Network},
journal = {ICCK Transactions on Internet of Things},
year = {2024},
volume = {2},
number = {4},
pages = {95-112},
doi = {10.62762/TIOT.2024.918236},
url = {https://www.icck.org/article/abs/TIOT.2024.918236},
abstract = {This study focuses on optimizing multimodal robot route planning in intelligent logistics management by integrating Transformer models, Graph Neural Networks (GNNs), and Generative Adversarial Networks (GANs). Using a graph structure representing map information, cargo distribution, and robot states, spatial and resource constraints are considered to optimize paths. Extensive simulations based on real logistics datasets demonstrate significant improvements over traditional methods, with an average 15\\% reduction in path length, 20\% improvement in time efficiency, and 10\% reduction in energy consumption. These results underscore the effectiveness and superiority of the proposed multimodal path planning algorithm, offering robust support for advancing intelligent logistics management.},
keywords = {multimodal robots, deep path planning, transformer model, graph neural network, generative adversarial network},
issn = {pending},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Portico
