Chinese Journal of Information Fusion | Volume 1, Issue 1: 50-62, 2024 | DOI: 10.62762/CJIF.2024.361889
Abstract
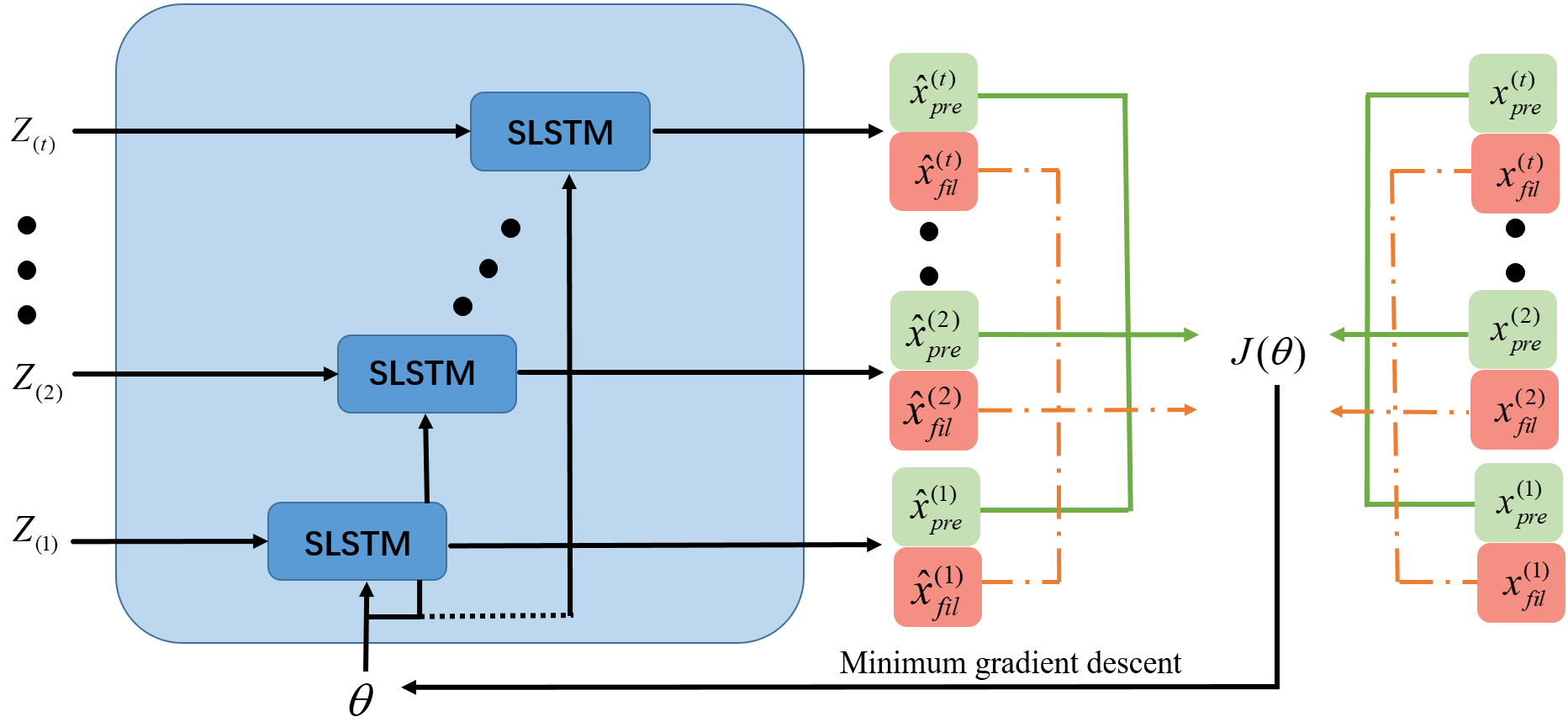
Maneuvering target tracking, as a core task in multi-sensor information fusion, is widely used in unmanned vehicles, missile navigation, and underwater ship localization, where real-time and robust state estimation is critical. Due to the uncertainty of the moving characteristics of maneuvering targets and the low sensor measurement accuracy, trajectory tracking has always been an open research problem and challenging work. This paper proposes a Bayesian-inspired stacked LSTM fusion network (SLSTM) for uncertain motion characteristics. The network consists of two LSTM fusion networks with stacked serial relationships, one of which is used to predict the movement dynamics, and the other is us... More >
Graphical Abstract