ICCK Transactions on Sensing, Communication, and Control | Volume 3, Issue 2: 64-75, 2026 | DOI: 10.62762/TSCC.2026.214827
Abstract
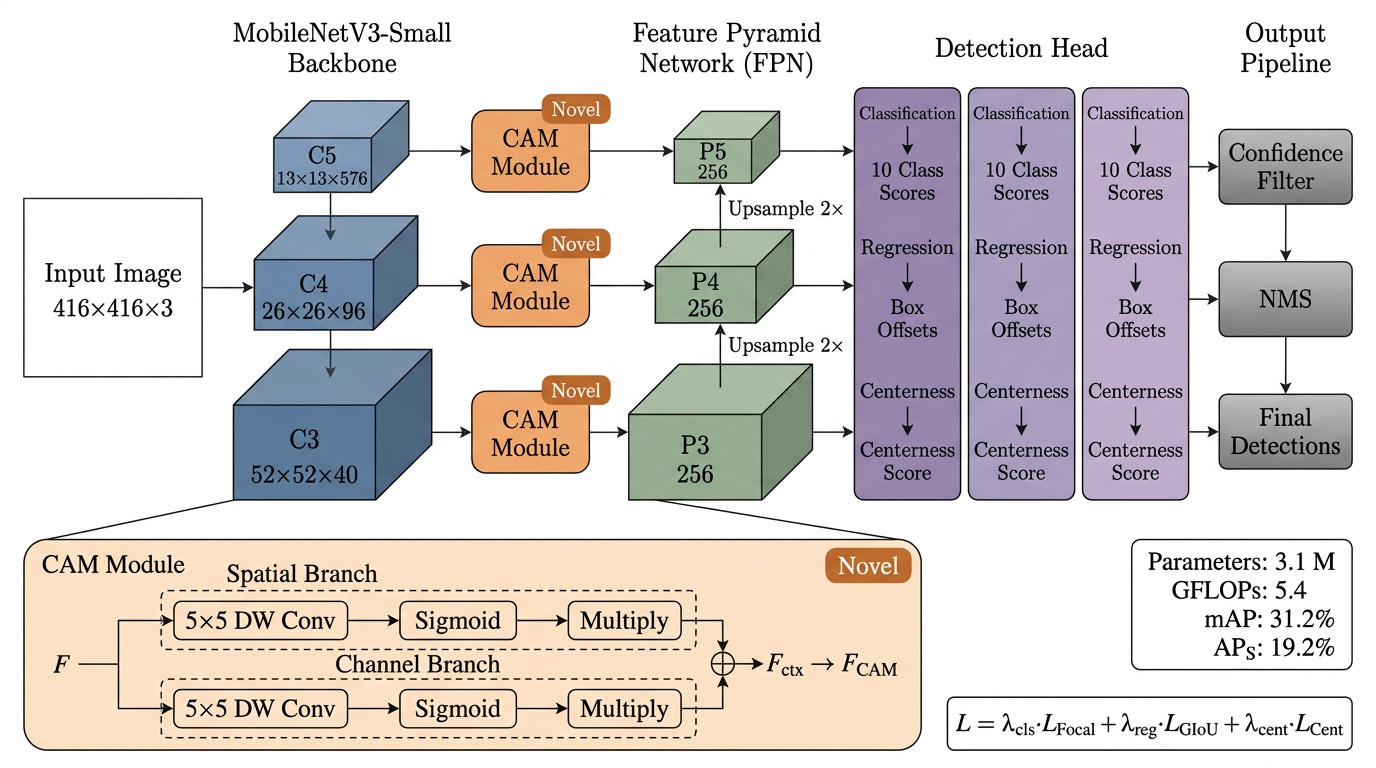
With the rapid advancement of unmanned aerial vehicle (UAV) technology, there is a need for lightweight and accurate object detection on resource-constrained platforms. This paper proposes MS-CADNet, an anchor-free network for small object detection in aerial imagery. It uses a MobileNetV3-Small backbone and a two-branch gated Context Attention Module (CAM) to enhance feature quality. On the VisDrone-DET benchmark, it achieves 31.2% mAP, surpassing YOLOv8-Small and CEASC. The model attains 19.2% AP for small objects with only 3.1M parameters and 5.4 GFLOPs, making it suitable for real-time UAV deployment. More >
Graphical Abstract