Why Large Spacecraft Swarms Will Be Maintained Primarily by Design, Not Solely by Control
Article Information
Abstract
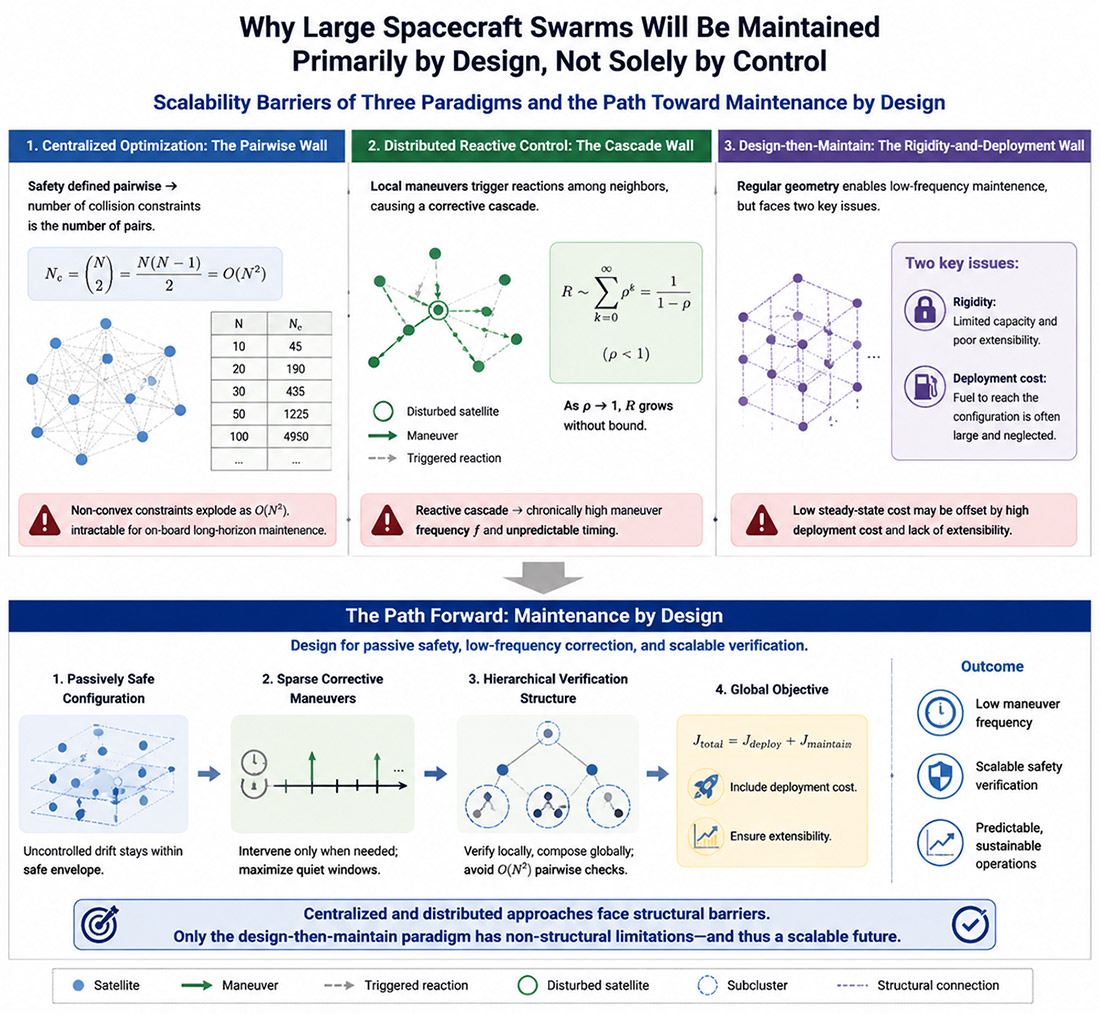
As orbital swarms grow toward populations of tens to hundreds, long-term maintenance changes character. We argue that it is distinct from reconfiguration or trajectory planning, defined by two requirements: it is perpetual, and it must be low-frequency, because every active maneuver arc is stolen from the payload's working time. Against these requirements the three dominant paradigms: centralized planning, distributed reactive control, and configuration design-then-maintain, fail in qualitatively different ways. Two of these failures are structural, properties of how the problem is posed; only the third is fixable. We therefore contend that scalable swarm maintenance will be achieved primarily by design rather than by control alone, provided the design phase is reformulated to treat deployment cost and extensibility as first-class objectives. We close on the resulting open question: how to lift safety from a pairwise to a collective property so that its cost stops growing with the number of pairs.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
AI Use Statement
Ethical Approval and Consent to Participate
References
- Gaias, G., & D’Amico, S. (2015). Impulsive maneuvers for formation reconfiguration using relative orbital elements. Journal of Guidance, Control, and Dynamics, 38(6), 1036-1049.
[CrossRef] [Google Scholar] - Chernick, M., & D’Amico, S. (2018). New closed-form solutions for optimal impulsive control of spacecraft relative motion. Journal of Guidance, Control, and Dynamics, 41(2), 301-319.
[CrossRef] [Google Scholar] - D'Amico, S., & Montenbruck, O. (2006). Proximity operations of formation-flying spacecraft using an eccentricity/inclination vector separation. Journal of Guidance, Control, and Dynamics, 29(3), 554-563.
[CrossRef] [Google Scholar] - Guffanti, T., & D’Amico, S. (2023). Passively safe and robust multi-agent optimal control with application to distributed space systems. Journal of Guidance, Control, and Dynamics, 46(8), 1448-1469.
[CrossRef] [Google Scholar] - Chenglong, X. U., Zhang, C., & Jihe, W. A. N. G. (2025). Passively safe configuration design for spacecraft swarm flying with boundary constraints. Chinese Journal of Aeronautics, 38(8), 103595.
[CrossRef] [Google Scholar] - Wang, Z., Xu, Y., Jiang, C., & Zhang, Y. (2019). Self-organizing control for satellite clusters using artificial potential function in terms of relative orbital elements. Aerospace Science and Technology, 84, 799-811.
[CrossRef] [Google Scholar] - Chen, Q., Meng, Y., Liao, Y., & Wei, C. (2023). Intersatellite distance-keeping control based on relative motion geometry. Journal of Guidance, Control, and Dynamics, 46(1), 177-185.
[CrossRef] [Google Scholar] - Chen, Q., Jin, H., Wei, C., & Liao, Y. (2025). Distributed impulsive satellite swarm-keeping based on connectivity and relative Cartesian states. Journal of Guidance, Control, and Dynamics, 48(2), 269-281.
[CrossRef] [Google Scholar] - Morgan, D., Chung, S. J., Blackmore, L., Acikmese, B., Bayard, D., & Hadaegh, F. Y. (2012). Swarm-keeping strategies for spacecraft under J2 and atmospheric drag perturbations. Journal of Guidance, Control, and Dynamics, 35(5), 1492-1506.
[CrossRef] [Google Scholar] - Koenig, A. W., & D’Amico, S. (2018). Robust and safe N-spacecraft swarming in perturbed near-circular orbits. Journal of Guidance, Control, and Dynamics, 41(8), 1643-1662.
[CrossRef] [Google Scholar] - Xu, C., Zhang, C., & Wang, J. (2025). Passive safety maintenance for long-term spacecraft cluster flying utilizing relative motion perturbed evolution law. Aerospace Science and Technology, 164, 110402.
[CrossRef] [Google Scholar] - Xu, C., Zhang, C., & Wang, J. (2025). Analytic solution for combined in-plane and out-of-plane spacecraft formation reconfiguration with passive collision avoidance. Acta Astronautica, 226, 48-59.
[CrossRef] [Google Scholar]
Cite This Article
TY - JOUR AU - Xu, Chenglong PY - 2026 DA - 2026/06/25 TI - Why Large Spacecraft Swarms Will Be Maintained Primarily by Design, Not Solely by Control JO - Aerospace Engineering Communications T2 - Aerospace Engineering Communications JF - Aerospace Engineering Communications VL - 1 IS - 2 SP - 87 EP - 92 DO - 10.62762/AEC.2026.392649 UR - https://www.icck.org/article/abs/AEC.2026.392649 KW - spacecraft swarms KW - maintenance KW - passive safety KW - configuration design KW - formation flying AB - As orbital swarms grow toward populations of tens to hundreds, long-term maintenance changes character. We argue that it is distinct from reconfiguration or trajectory planning, defined by two requirements: it is perpetual, and it must be low-frequency, because every active maneuver arc is stolen from the payload's working time. Against these requirements the three dominant paradigms: centralized planning, distributed reactive control, and configuration design-then-maintain, fail in qualitatively different ways. Two of these failures are structural, properties of how the problem is posed; only the third is fixable. We therefore contend that scalable swarm maintenance will be achieved primarily by design rather than by control alone, provided the design phase is reformulated to treat deployment cost and extensibility as first-class objectives. We close on the resulting open question: how to lift safety from a pairwise to a collective property so that its cost stops growing with the number of pairs. SN - 3071-1967 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Xu2026Why,
author = {Chenglong Xu},
title = {Why Large Spacecraft Swarms Will Be Maintained Primarily by Design, Not Solely by Control},
journal = {Aerospace Engineering Communications},
year = {2026},
volume = {1},
number = {2},
pages = {87-92},
doi = {10.62762/AEC.2026.392649},
url = {https://www.icck.org/article/abs/AEC.2026.392649},
abstract = {As orbital swarms grow toward populations of tens to hundreds, long-term maintenance changes character. We argue that it is distinct from reconfiguration or trajectory planning, defined by two requirements: it is perpetual, and it must be low-frequency, because every active maneuver arc is stolen from the payload's working time. Against these requirements the three dominant paradigms: centralized planning, distributed reactive control, and configuration design-then-maintain, fail in qualitatively different ways. Two of these failures are structural, properties of how the problem is posed; only the third is fixable. We therefore contend that scalable swarm maintenance will be achieved primarily by design rather than by control alone, provided the design phase is reformulated to treat deployment cost and extensibility as first-class objectives. We close on the resulting open question: how to lift safety from a pairwise to a collective property so that its cost stops growing with the number of pairs.},
keywords = {spacecraft swarms, maintenance, passive safety, configuration design, formation flying},
issn = {3071-1967},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions
 Copyright © 2026 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
Copyright © 2026 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.

Portico
