Beyond Periodic Flapping: Adaptive Unsteady Aerodynamics in Bio-inspired Flying Robots
Article Information
Abstract
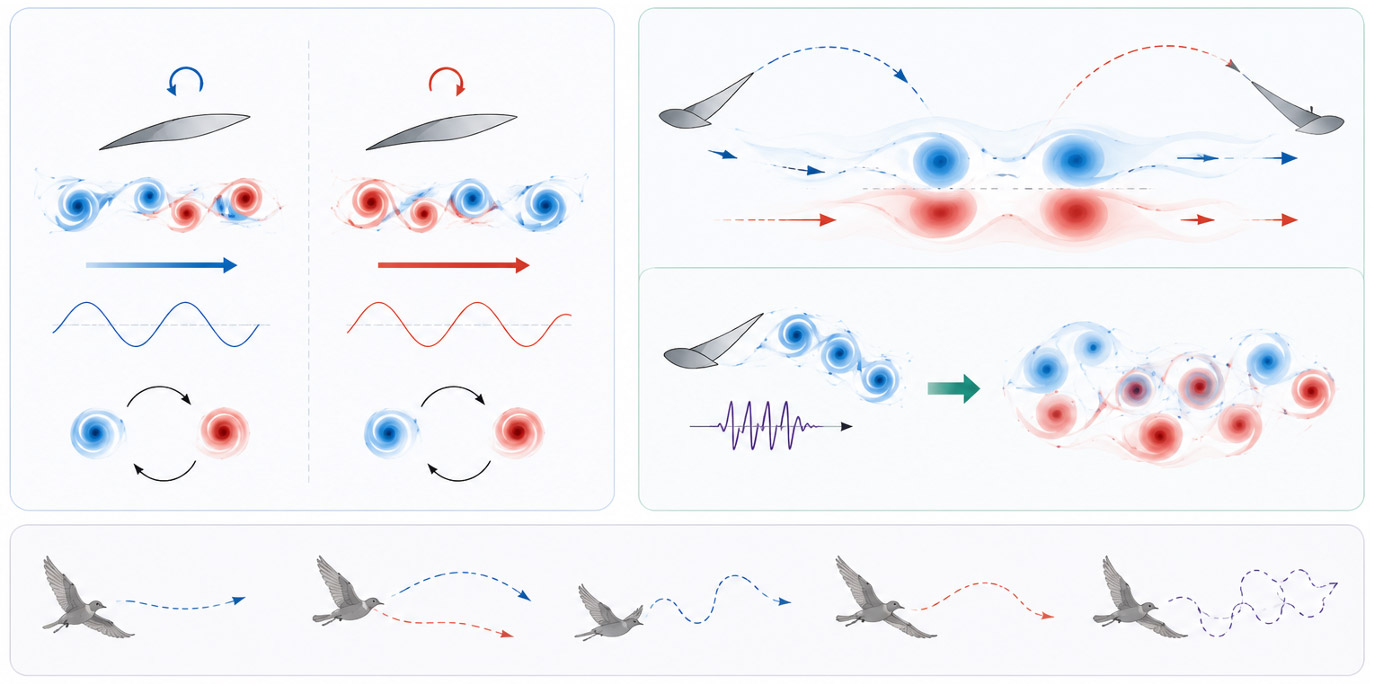
Flapping-wing flight has long inspired bio-inspired aerial robots because of its extraordinary aerodynamic efficiency and maneuverability. Although substantial progress has been achieved in understanding unsteady aerodynamic mechanisms, most existing frameworks remain centered on idealized periodic wing motions and cycle-averaged propulsion. Recent studies increasingly suggest that transient asymmetries and multi-frequency perturbations, traditionally regarded as disturbances, can actively reorganize vortex dynamics and enhance aerodynamic performance. These findings imply that biological flight may rely not solely on stable periodic propulsion, but on continuous adaptation to evolving flow environments. Here, we argue that the next paradigm of flapping-wing aerodynamics should move beyond harmonic propulsion toward adaptive unsteady flight. We discuss how perturbation-enabled control, transient vortex interactions, and fluid-mediated adaptation may reshape the development of future flapping-wing air vehicles capable of dynamically integrating with complex aerodynamic environments.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
AI Use Statement
Ethical Approval and Consent to Participate
References
- Platzer, M. F., Jones, K. D., Young, J., & Lai, J. C. (2008). Flapping wing aerodynamics: progress and challenges. AIAA journal, 46(9), 2136-2149.
[CrossRef] [Google Scholar] - Han, J. H., Han, Y. J., Yang, H. H., Lee, S. G., & Lee, E. H. (2023). A review of flapping mechanisms for avian-inspired flapping-wing air vehicles. Aerospace, 10(6), 554.
[CrossRef] [Google Scholar] - Kandel, P., Wang, J., & Deng, J. (2026). Flapping Foil-Based Propulsion and Power Generation: A Comprehensive Review. Biomimetics, 11(2), 86.
[CrossRef] [Google Scholar] - Shyy, W., Aono, H., & Liu, H. (2010). Flapping wing aerodynamics. Encyclopedia of Aerospace Engineering, 1, 231.
[CrossRef] [Google Scholar] - Engels, T., Kolomenskiy, D., Schneider, K., Lehmann, F. O., & Sesterhenn, J. (2016). Bumblebee flight in heavy turbulence. Physical review letters, 116(2), 028103.
[CrossRef] [Google Scholar] - Andersen, A., Bohr, T., Schnipper, T., & Walther, J. H. (2017). Wake structure and thrust generation of a flapping foil in two-dimensional flow. Journal of fluid mechanics, 812, R4.
[CrossRef] [Google Scholar] - Gao, P., Huang, Q., & Pan, G. (2021). Propulsion performance and wake dynamics of heaving foils under different waveform input perturbations. Journal of Marine Science and Engineering, 9(11), 1271.
[CrossRef] [Google Scholar] - Ramananarivo, S., Godoy-Diana, R., & Thiria, B. (2011). Rather than resonance, flapping wing flyers may play on aerodynamics to improve performance. Proceedings of the National Academy of Sciences, 108(15), 5964-5969.
[CrossRef] [Google Scholar] - Wang, Z. J. (2005). Dissecting insect flight. Annu. Rev. Fluid Mech., 37(1), 183-210.
[CrossRef] [Google Scholar] - Wu, T. Y. (2011). Fish swimming and bird/insect flight. Annual Review of Fluid Mechanics, 43(1), 25--58.
[CrossRef] [Google Scholar] - Taylor, G. K., Nudds, R. L., & Thomas, A. L. (2003). Flying and swimming animals cruise at a Strouhal number tuned for high power efficiency. Nature, 425(6959), 707-711.
[CrossRef] [Google Scholar] - Rafee Nekoo, S., Rashad, R., De Wagter, C., Fuller, S. B., Croon, G. D., Stramigioli, S., & Ollero, A. (2025). A review on flapping-wing robots: Recent progress and challenges. The International Journal of Robotics Research, 44(14), 2305-2339.
[CrossRef] [Google Scholar] - Godoy-Diana, R., Aider, J. L., & Wesfreid, J. E. (2008). Transitions in the wake of a flapping foil. Physical Review E—Statistical, Nonlinear, and Soft Matter Physics, 77(1), 016308.
[CrossRef] [Google Scholar] - Godoy-Diana, R., Marais, C., Aider, J. L., & Wesfreid, J. E. (2009). A model for the symmetry breaking of the reverse Bénard–von Kármán vortex street produced by a flapping foil. Journal of Fluid Mechanics, 622, 23-32.
[CrossRef] [Google Scholar] - Lehn, A. M., Thornycroft, P. J., Lauder, G. V., & Leftwich, M. C. (2017). Effect of input perturbation on the performance and wake dynamics of aquatic propulsion in heaving flexible foils. Physical Review Fluids, 2(2), 023101.
[CrossRef] [Google Scholar] - Li, Q., Tan, T., Wang, B., & Yan, Z. (2024). Avian-inspired embodied perception in biohybrid flapping-wing robotics. Nature Communications, 15(1), 9099.
[CrossRef] [Google Scholar]
Cite This Article
TY - JOUR AU - Meng, Qiwen PY - 2026 DA - 2026/06/15 TI - Beyond Periodic Flapping: Adaptive Unsteady Aerodynamics in Bio-inspired Flying Robots JO - Aerospace Engineering Communications T2 - Aerospace Engineering Communications JF - Aerospace Engineering Communications VL - 1 IS - 2 SP - 81 EP - 86 DO - 10.62762/AEC.2026.970989 UR - https://www.icck.org/article/abs/AEC.2026.970989 KW - flapping-wing air vehicles KW - bio-inspired flight KW - fluid-structure interaction KW - biomimetic robotics KW - flapping-wing aerodynamics AB - Flapping-wing flight has long inspired bio-inspired aerial robots because of its extraordinary aerodynamic efficiency and maneuverability. Although substantial progress has been achieved in understanding unsteady aerodynamic mechanisms, most existing frameworks remain centered on idealized periodic wing motions and cycle-averaged propulsion. Recent studies increasingly suggest that transient asymmetries and multi-frequency perturbations, traditionally regarded as disturbances, can actively reorganize vortex dynamics and enhance aerodynamic performance. These findings imply that biological flight may rely not solely on stable periodic propulsion, but on continuous adaptation to evolving flow environments. Here, we argue that the next paradigm of flapping-wing aerodynamics should move beyond harmonic propulsion toward adaptive unsteady flight. We discuss how perturbation-enabled control, transient vortex interactions, and fluid-mediated adaptation may reshape the development of future flapping-wing air vehicles capable of dynamically integrating with complex aerodynamic environments. SN - 3071-1967 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Meng2026Beyond,
author = {Qiwen Meng},
title = {Beyond Periodic Flapping: Adaptive Unsteady Aerodynamics in Bio-inspired Flying Robots},
journal = {Aerospace Engineering Communications},
year = {2026},
volume = {1},
number = {2},
pages = {81-86},
doi = {10.62762/AEC.2026.970989},
url = {https://www.icck.org/article/abs/AEC.2026.970989},
abstract = {Flapping-wing flight has long inspired bio-inspired aerial robots because of its extraordinary aerodynamic efficiency and maneuverability. Although substantial progress has been achieved in understanding unsteady aerodynamic mechanisms, most existing frameworks remain centered on idealized periodic wing motions and cycle-averaged propulsion. Recent studies increasingly suggest that transient asymmetries and multi-frequency perturbations, traditionally regarded as disturbances, can actively reorganize vortex dynamics and enhance aerodynamic performance. These findings imply that biological flight may rely not solely on stable periodic propulsion, but on continuous adaptation to evolving flow environments. Here, we argue that the next paradigm of flapping-wing aerodynamics should move beyond harmonic propulsion toward adaptive unsteady flight. We discuss how perturbation-enabled control, transient vortex interactions, and fluid-mediated adaptation may reshape the development of future flapping-wing air vehicles capable of dynamically integrating with complex aerodynamic environments.},
keywords = {flapping-wing air vehicles, bio-inspired flight, fluid-structure interaction, biomimetic robotics, flapping-wing aerodynamics},
issn = {3071-1967},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions
 Copyright © 2026 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
Copyright © 2026 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.

Portico
