Embedded Multi-Core Gyro Attitude Data Acquisition System for Aerospace Vehicle Based on ZYNQ Platform
Article Information
Abstract
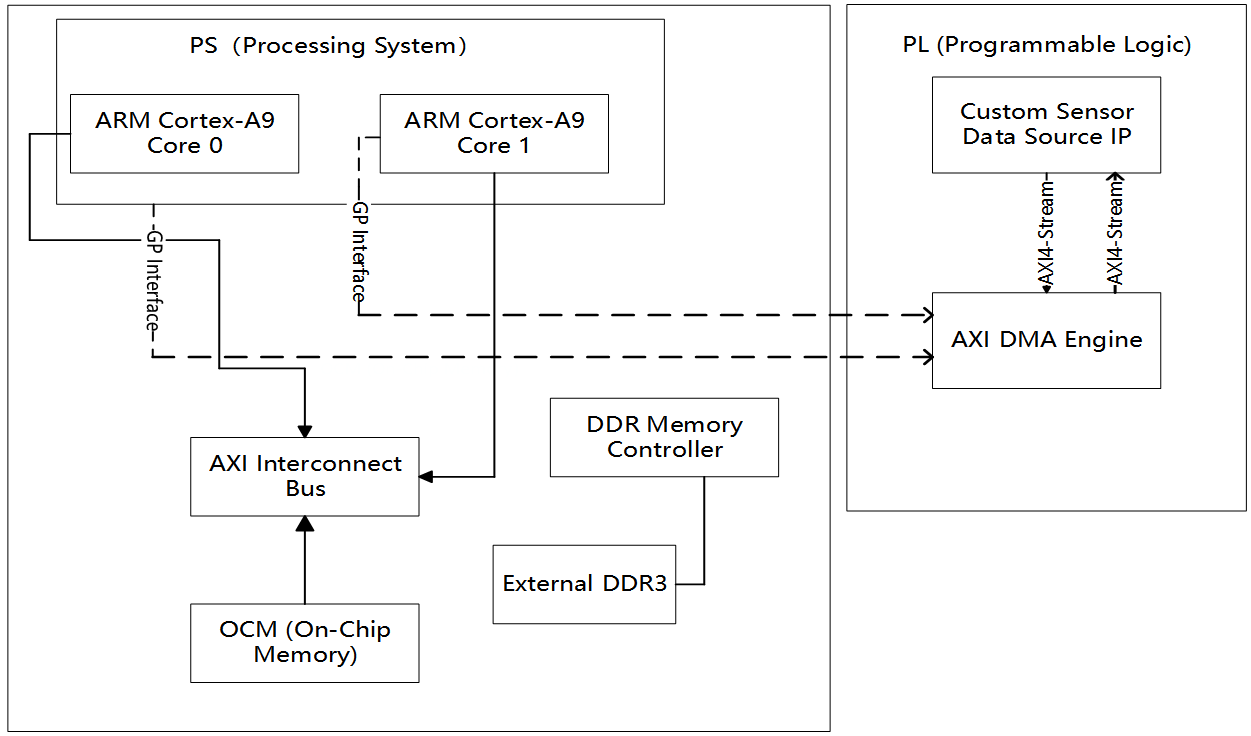
Aiming at the interrupt storm performance bottleneck existing in high-speed gyro attitude signal acquisition of aerospace vehicles, an embedded heterogeneous multi-core data acquisition system based on Xilinx ZYNQ-7000 SoC is proposed for inertial measurement unit (IMU) gyro signal sampling. On the hardware layer, a sensor data interface IP conforming to AXI4-Stream protocol is designed in programmable logic (PL) to collect high-frequency gyro original signals, and an AXI DMA controller builds a wideband direct peripheral-DDR transmission channel to realize zero-copy data writing, greatly reducing processor resource occupation under continuous inertial attitude sampling. On the software layer, an AMP dual-core bare-metal parallel framework is deployed in the processing system (PS): the main core undertakes real-time DMA scheduling and hardware interrupt response for gyro sampling streams, while the auxiliary core independently completes attitude data packaging and external communication transmission, thoroughly decoupling high-speed inertial signal acquisition and low-rate data interaction. Meanwhile, an inter-core communication (IPC) mechanism with ultra-low 1.5 $\mu$s delay is constructed based on on-chip memory (OCM) and spinlock algorithm to guarantee multi-core consistency of gyro attitude data. Closed-loop hardware-software joint verification shows that the system supports lossless gyro data transmission at 2 MB/s under 500 kSPS high sampling rate with zero packet loss; the channel inherent noise is measured at 2.4 mV, well within the 5 mV specification threshold, which meets the high real-time and high-precision measurement requirements of aerospace vehicle inertial gyro attitude sensing, and verifies the engineering advantages of this heterogeneous multi-core architecture in aerospace inertial measurement.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
AI Use Statement
Ethical Approval and Consent to Participate
References
- Huang, J. (2021, August). Design of four channel data acquisition system based on Ldc1614. In Journal of Physics: Conference Series (Vol. 1992, No. 4, p. 042034). IOP Publishing.
[CrossRef] [Google Scholar] - Zhou, K., Zhang, Q., Guo, L., Feng, G., Li, C., Zhang, J., & Zhang, Q. (2024). Development of a Zynq-Based Seismic Acquisition Station for the Exploration of Antarctic Subglacial Lakes. Sensors, 24(23), 7667.
[CrossRef] [Google Scholar] - Bai, Y., Zhang, X., Yang, Q., Yang, Y., Deng, W., & Yao, D. (2021). Multi-channel data acquisition card under new acquisition and transmission architecture of high frequency ground wave radar. Sensors, 21(4), 1128.
[CrossRef] [Google Scholar] - Sun, Y., Li, E., Yang, G., Liang, Z., & Guo, R. (2019, August). Design of a dual-core processor based controller with rtos-gpos dual operating system. In 2019 IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 1859-1864). IEEE.
[CrossRef] [Google Scholar] - Xilinx Inc. (2015). Zynq-7000 all programmable SoC technical reference manual (UG585). Retrieved from https://docs.amd.com/r/en-US/ug585-zynq-7000-SoC-TRM/Introduction?tocId=Hf6C7Oo5ABvv2hkWRoiihQ
[Google Scholar] - Savitzky, A., & Golay, M. J. E. (1964). Smoothing and differentiation of data by simplified least squares procedures. Analytical Chemistry, 36(8), 1627--1639.
[CrossRef] [Google Scholar] - ARM Limited. (2012). Cortex-A9 Technical Reference Manual (Revision r4p1). Retrieved from https://developer.arm.com/documentation/ddi0388/i
[Google Scholar] - Abdelfatah, W. F., Georgy, J., Iqbal, U., & Noureldin, A. (2012). FPGA-based real-time embedded system for RISS/GPS integrated navigation. Sensors, 12(1), 115-147.
[CrossRef] [Google Scholar] - El-Sheimy, N., Hou, H., & Niu, X. (2008). Analysis and modeling of inertial sensors using Allan variance. IEEE Transactions on Instrumentation and Measurement, 57(1), 140-149.
[CrossRef] [Google Scholar] - Mellor-Crummey, J. M., & Scott, M. L. (1991). Algorithms for scalable synchronization on shared-memory multiprocessors. ACM Transactions on Computer Systems, 9(1), 21-65.
[CrossRef] [Google Scholar] - ARM Limited. (2021). AMBA AXI and ACE Protocol Specification (IHI 0022H). Retrieved from https://developer.arm.com/documentation/ihi0022/h
[Google Scholar]
Cite This Article
TY - JOUR AU - Liu, Youguo AU - Jiang, Qingguo PY - 2026 DA - 2026/07/01 TI - Embedded Multi-Core Gyro Attitude Data Acquisition System for Aerospace Vehicle Based on ZYNQ Platform JO - Aerospace Engineering Communications T2 - Aerospace Engineering Communications JF - Aerospace Engineering Communications VL - 1 IS - 3 SP - 93 EP - 99 DO - 10.62762/AEC.2026.284427 UR - https://www.icck.org/article/abs/AEC.2026.284427 KW - ZYNQ SoC KW - aerospace inertial measurement KW - gyro attitude data acquisition KW - Asymmetric Multi-Processing (AMP) KW - AXI DMA KW - Inter-Processor Communication (IPC) KW - spin lock AB - Aiming at the interrupt storm performance bottleneck existing in high-speed gyro attitude signal acquisition of aerospace vehicles, an embedded heterogeneous multi-core data acquisition system based on Xilinx ZYNQ-7000 SoC is proposed for inertial measurement unit (IMU) gyro signal sampling. On the hardware layer, a sensor data interface IP conforming to AXI4-Stream protocol is designed in programmable logic (PL) to collect high-frequency gyro original signals, and an AXI DMA controller builds a wideband direct peripheral-DDR transmission channel to realize zero-copy data writing, greatly reducing processor resource occupation under continuous inertial attitude sampling. On the software layer, an AMP dual-core bare-metal parallel framework is deployed in the processing system (PS): the main core undertakes real-time DMA scheduling and hardware interrupt response for gyro sampling streams, while the auxiliary core independently completes attitude data packaging and external communication transmission, thoroughly decoupling high-speed inertial signal acquisition and low-rate data interaction. Meanwhile, an inter-core communication (IPC) mechanism with ultra-low 1.5 $\mu$s delay is constructed based on on-chip memory (OCM) and spinlock algorithm to guarantee multi-core consistency of gyro attitude data. Closed-loop hardware-software joint verification shows that the system supports lossless gyro data transmission at 2 MB/s under 500 kSPS high sampling rate with zero packet loss; the channel inherent noise is measured at 2.4 mV, well within the 5 mV specification threshold, which meets the high real-time and high-precision measurement requirements of aerospace vehicle inertial gyro attitude sensing, and verifies the engineering advantages of this heterogeneous multi-core architecture in aerospace inertial measurement. SN - 3071-1967 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Liu2026Embedded,
author = {Youguo Liu and Qingguo Jiang},
title = {Embedded Multi-Core Gyro Attitude Data Acquisition System for Aerospace Vehicle Based on ZYNQ Platform},
journal = {Aerospace Engineering Communications},
year = {2026},
volume = {1},
number = {3},
pages = {93-99},
doi = {10.62762/AEC.2026.284427},
url = {https://www.icck.org/article/abs/AEC.2026.284427},
abstract = {Aiming at the interrupt storm performance bottleneck existing in high-speed gyro attitude signal acquisition of aerospace vehicles, an embedded heterogeneous multi-core data acquisition system based on Xilinx ZYNQ-7000 SoC is proposed for inertial measurement unit (IMU) gyro signal sampling. On the hardware layer, a sensor data interface IP conforming to AXI4-Stream protocol is designed in programmable logic (PL) to collect high-frequency gyro original signals, and an AXI DMA controller builds a wideband direct peripheral-DDR transmission channel to realize zero-copy data writing, greatly reducing processor resource occupation under continuous inertial attitude sampling. On the software layer, an AMP dual-core bare-metal parallel framework is deployed in the processing system (PS): the main core undertakes real-time DMA scheduling and hardware interrupt response for gyro sampling streams, while the auxiliary core independently completes attitude data packaging and external communication transmission, thoroughly decoupling high-speed inertial signal acquisition and low-rate data interaction. Meanwhile, an inter-core communication (IPC) mechanism with ultra-low 1.5 \$\mu\$s delay is constructed based on on-chip memory (OCM) and spinlock algorithm to guarantee multi-core consistency of gyro attitude data. Closed-loop hardware-software joint verification shows that the system supports lossless gyro data transmission at 2 MB/s under 500 kSPS high sampling rate with zero packet loss; the channel inherent noise is measured at 2.4 mV, well within the 5 mV specification threshold, which meets the high real-time and high-precision measurement requirements of aerospace vehicle inertial gyro attitude sensing, and verifies the engineering advantages of this heterogeneous multi-core architecture in aerospace inertial measurement.},
keywords = {ZYNQ SoC, aerospace inertial measurement, gyro attitude data acquisition, Asymmetric Multi-Processing (AMP), AXI DMA, Inter-Processor Communication (IPC), spin lock},
issn = {3071-1967},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions
 Copyright © 2026 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
Copyright © 2026 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.

Portico
