State-of-the-Art Advances and Emerging Challenges in UAV Routing Optimization: A Comprehensive Review





Article Information
Abstract
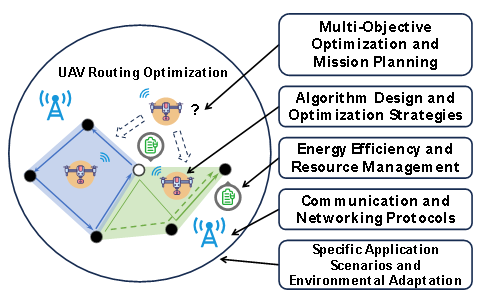
This literature review offers an in-depth overview of recent advances in routing optimization for Unmanned Aerial Vehicles (UAVs), a field central to improving the performance, reliability, and flexibility of UAV systems. The review is organized into five categories: (1) multi-objective mission planning, (2) algorithmic design and optimization techniques, (3) energy efficiency and resource allocation, (4) communication protocols and network management, and (5) context-specific applications and environmental adaptability. The review highlights methodological progress and algorithmic approaches developed to balance competing demands such as mission effectiveness, energy use, and communication stability. Emphasis is placed on techniques that aim to extend UAV network longevity through effective energy strategies and on the creation of robust communication frameworks to support dependable data exchange. The study also considers how routing methods are being adapted to accommodate dynamic operational environments and varying external conditions. By drawing together insights from these areas, the review provides a comprehensive perspective on the current state of UAV routing optimization and identifies pressing challenges and directions for future research, with a focus on developing more adaptive and intelligent routing solutions.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
Ethical Approval and Consent to Participate
References
- Abdel-Malek, M. A., Saputro, N., Ibrahim, A. S., & Akkaya, K. (2021). Uav-assisted multi-path parallel routing for mmwave-based wireless networks. Internet of Things, 14, 100366.
[CrossRef] [Google Scholar] - Alam, M. M., & Moh, S. (2022). Joint topology control and routing in a UAV swarm for crowd surveillance. Journal of Network and Computer Applications, 204, 103427.
[CrossRef] [Google Scholar] - Aldaej, A., Atiquzzaman, M., Ahanger, T. A., & Shukla, P. K. (2023). Multidomain blockchain-based intelligent routing in UAV-IoT networks. Computer Communications, 205, 158-169.
[CrossRef] [Google Scholar] - Azzoug, Y., & Boukra, A. (2022). Enhanced UAV-aided vehicular delay tolerant network (VDTN) routing for urban environment using a bio-inspired approach. Ad hoc networks, 133, 102902.
[CrossRef] [Google Scholar] - Almeida, E. N., Coelho, A., Ruela, J., Campos, R., & Ricardo, M. (2021). Joint traffic-aware UAV placement and predictive routing for aerial networks. Ad Hoc Networks, 118, 102525.
[CrossRef] [Google Scholar] - Bocewicz, G., Radzki, G., Nielsen, P., & Banaszak, Z. (2022). UAVs’ Dynamic Routing, Subject to Time Windows Variation. IFAC-PapersOnLine, 55(2), 457-462.
[CrossRef] [Google Scholar] - Bousbaa, F. Z., Kerrache, C. A., Mahi, Z., Tahari, A. E. K., Lagraa, N., & Yagoubi, M. B. (2020). GeoUAVs: A new geocast routing protocol for fleet of UAVs. Computer Communications, 149, 259-269.
[CrossRef] [Google Scholar] - Cai, W., Xue, X., & Yang, J. (2025). Energy-Efficient Trajectory and Resource Optimization for Cognitive IoT-Enabled UAV Aerial Computing in Smart Healthcare Systems. IEEE Internet of Things Journal.
[CrossRef] [Google Scholar] - Coelho, B. N., Coelho, V. N., Coelho, I. M., Ochi, L. S., Haghnazar, R., Zuidema, D., ... & da Costa, A. R. (2017). A multi-objective green UAV routing problem. Computers & Operations Research, 88, 306-315.
[CrossRef] [Google Scholar] - Dasdemir, E., Batta, R., Köksalan, M., & Öztürk, D. T. (2022). UAV routing for reconnaissance mission: A multi-objective orienteering problem with time-dependent prizes and multiple connections. Computers & Operations Research, 145, 105882.
[CrossRef] [Google Scholar] - Dui, H., Zhang, H., Dong, X., Wu, S., & Wang, Y. (2025). Multi-stage control strategy of IoT-enabled unmanned vehicle detection systems. IEEE Transactions on Intelligent Transportation Systems.
[CrossRef] [Google Scholar] - Dui, H., Zhang, H., Wu, S., & Xie, M. (2025). Spatiotemporal Resilience Analysis of IoT-enabled Unmanned System of Systems. Engineering.
[CrossRef] [Google Scholar] - Dui, H., Zhang, H., Zhang, S., & Dong, X. (2025). IoUT-Enhanced Cooperative Control Scheme for Multiple AUVs With IoT Data Reliability. IEEE Internet of Things Journal.
[CrossRef] [Google Scholar] - Dixit, A., & Singh, S. K. (2023). BMUDF: Hybrid Bio-inspired Model for fault-aware UAV routing using Destination-aware Fan shaped clustering. Internet of Things, 22, 100790.
[CrossRef] [Google Scholar] - Faiz, T. I., Vogiatzis, C., & Noor-E-Alam, M. (2024). Computational approaches for solving two-echelon vehicle and UAV routing problems for post-disaster humanitarian operations. Expert Systems with Applications, 237, 121473.
[CrossRef] [Google Scholar] - Fang, C., Han, Z., Wang, W., & Zio, E. (2023). Routing UAVs in landslides Monitoring: A neural network heuristic for team orienteering with mandatory visits. Transportation Research Part E: Logistics and Transportation Review, 175, 103172.
[CrossRef] [Google Scholar] - Fu, Z., Liu, J., Mao, Y., Qu, L., Xie, L., & Wang, X. (2025). Energy-Efficient UAV-Assisted Federated Learning: Trajectory Optimization, Device Scheduling, and Resource Management. IEEE Transactions on Network and Service Management.
[CrossRef] [Google Scholar] - Gharib, M., Afghah, F., & Bentley, E. S. (2022). LB-OPAR: Load balanced optimized predictive and adaptive routing for cooperative UAV networks. Ad Hoc Networks, 132, 102878.
[CrossRef] [Google Scholar] - Hu, H., Li, X., Ha, M., Wang, X., Shang, C., & Shen, Q. (2023). Multi-depot vehicle routing programming for hazmat transportation with weight variation risk. Transportmetrica B: Transport Dynamics, 11(1), 1136-1160.
[CrossRef] [Google Scholar] - Karmakar, P., Shah, V. K., Roy, S., Hazra, K., Saha, S., & Nandi, S. (2022). Reliable backhauling in aerial communication networks against UAV failures: A deep reinforcement learning approach. IEEE Transactions on Network and Service Management, 19(3), 2798-2811.
[CrossRef] [Google Scholar] - Korium, M. S., Saber, M., Ahmed, A. M., Narayanan, A., & Nardelli, P. H. (2024). Image-based intrusion detection system for GPS spoofing cyberattacks in unmanned aerial vehicles. Ad Hoc Networks, 163, 103597.
[CrossRef] [Google Scholar] - Li, X., Liu, X., Ma, H., & Hu, S. (2020). Integrated routing optimization for post-disaster rapid-detailed need assessment. International Journal of General Systems, 49(5), 521-545.
[CrossRef] [Google Scholar] - Liu, H., Lin, M., & Deng, L. (2016). UAV route planning for aerial photography under interval uncertainties. Optik, 127(20), 9695-9700.
[CrossRef] [Google Scholar] - Liu, H., Chen, R., Ding, S., Jiang, Z., Liu, F., & Zhang, J. (2024). An energy efficiency routing protocol for UAV-aided WSNs data collection. Ad Hoc Networks, 154, 103378.
[CrossRef] [Google Scholar] - Maleki, F., Jamali, M. A. J., & Heidari, A. (2025). Unmanned aerial vehicle routing based on frog-leaping optimization algorithm. Scientific Reports, 15(1), 11249.
[CrossRef] [Google Scholar] - Meng, D., Xiao, Y., Guo, Z., Jolfaei, A., Qin, L., Lu, X., & Xiang, Q. (2021). A data-driven intelligent planning model for UAVs routing networks in mobile Internet of Things. Computer Communications, 179, 231-241.
[CrossRef] [Google Scholar] - Mittal, P., Shah, S., Agarwal, A., Mishra, D., & Debnath, S. (2023). Interference aware joint power control and routing optimization in multi-uav fanets. Ad Hoc Networks, 150, 103280.
[CrossRef] [Google Scholar] - Oubbati, O. S., Lakas, A., Zhou, F., Güneş, M., Lagraa, N., & Yagoubi, M. B. (2017). Intelligent UAV-assisted routing protocol for urban VANETs. Computer communications, 107, 93-111.
[CrossRef] [Google Scholar] - Ozkan, O. (2021). Optimization of the distance-constrained multi-based multi-UAV routing problem with simulated annealing and local search-based matheuristic to detect forest fires: The case of Turkey. Applied Soft Computing, 113, 108015.
[CrossRef] [Google Scholar] - Öztürk, D. T., & Köksalan, M. (2023). Biobjective route planning of an unmanned air vehicle in continuous space. Transportation Research Part B: Methodological, 168, 151-169.
[CrossRef] [Google Scholar] - Peng, R. (2018). Joint routing and aborting optimization of cooperative unmanned aerial vehicles. Reliability Engineering & System Safety, 177, 131-137.
[CrossRef] [Google Scholar] - Pang, B., Low, K. H., & Lv, C. (2022). Adaptive conflict resolution for multi-UAV 4D routes optimization using stochastic fractal search algorithm. Transportation Research Part C: Emerging Technologies, 139, 103666.
[CrossRef] [Google Scholar] - Pang, X., Liu, M., Li, Z., Gao, B., & Guo, X. (2021). Geographic position based hopless opportunistic routing for UAV networks. Ad Hoc Networks, 120, 102560.
[CrossRef] [Google Scholar] - Qin, W., Shi, Z., Li, W., Li, K., Zhang, T., & Wang, R. (2021). Multiobjective routing optimization of mobile charging vehicles for UAV power supply guarantees. Computers & Industrial Engineering, 162, 107714.
[CrossRef] [Google Scholar] - Rozaliya, B. Z. H., Wang, I. L., & Muklason, A. (2022). Multi-UAV routing for maximum surveillance data collection with idleness and latency constraints. Procedia Computer Science, 197, 264-272.
[CrossRef] [Google Scholar] - Rovira-Sugranes, A., Razi, A., Afghah, F., & Chakareski, J. (2022). A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Networks, 130, 102790.
[CrossRef] [Google Scholar] - Ren, Z., Hussain, K., & Faheem, M. (2024). K-means online-learning routing protocol (K-MORP) for unmanned aerial vehicles (UAV) adhoc networks. Ad Hoc Networks, 154, 103354.
[CrossRef] [Google Scholar] - Sajid, M., Mittal, H., Pare, S., & Prasad, M. (2022). Routing and scheduling optimization for UAV assisted delivery system: A hybrid approach. Applied Soft Computing, 126, 109225.
[CrossRef] [Google Scholar] - Sharvari, N. P., Das, D., Bapat, J., & Das, D. (2023). Connectivity and collision constrained opportunistic routing for emergency communication using UAV. Computer networks, 220, 109468.
[CrossRef] [Google Scholar] - Shi, J., Mao, H., Zhou, Z., & Zheng, L. (2023). Adaptive large neighborhood search algorithm for the Unmanned aerial vehicle routing problem with recharging. Applied Soft Computing, 147, 110831.
[CrossRef] [Google Scholar] - Swain, S., Khilar, P. M., & Senapati, B. R. (2023). A reinforcement learning-based cluster routing scheme with dynamic path planning for mutli-uav network. Vehicular Communications, 41, 100605.
[CrossRef] [Google Scholar] - Thibbotuwawa, A., Bocewicz, G., Nielsen, P., & Zbigniew, B. (2019). Planning deliveries with UAV routing under weather forecast and energy consumption constraints. IFAC-PapersOnLine, 52(13), 820-825.
[CrossRef] [Google Scholar] - Wang, H., Zhao, H., Zhang, J., Ma, D., Li, J., & Wei, J. (2019). Survey on unmanned aerial vehicle networks: A cyber physical system perspective. IEEE Communications Surveys & Tutorials, 22(2), 1027-1070.
[CrossRef] [Google Scholar] - Wang, X., Wang, H., Zhang, H., Wang, M., Wang, L., Cui, K., ... & Ding, Y. (2023). A mini review on UAV mission planning. Journal of Industrial and Management Optimization, 19(5), 3362-3382.
[CrossRef] [Google Scholar] - Wu, Y., & Low, K. H. (2022). Discrete space-based route planning for rotary-wing UAV formation in urban environments. ISA transactions, 129, 243-259.
[CrossRef] [Google Scholar] - Yakıcı, E. (2016). Solving location and routing problem for UAVs. Computers & Industrial Engineering, 102, 294-301.
[CrossRef] [Google Scholar] - Yan, R., Zhu, X., Zhu, X., & Peng, R. (2023). Joint optimisation of task abortions and routes of truck-and-drone systems under random attacks. Reliability Engineering & System Safety, 235, 109249.
[CrossRef] [Google Scholar] - Yan, S., Sun, C. S., & Chen, Y. H. (2024). Optimal routing and scheduling of unmanned aerial vehicles for delivery services. Transportation Letters, 16(7), 764-775.
[CrossRef] [Google Scholar] - Yang, L., Wei, F., & Qiu, Q. (2024). Mission risk control via joint optimization of sampling and abort decisions. Risk Analysis, 44(3), 666-685.
[CrossRef] [Google Scholar] - Yu, A., Kolotylo, I., Hashim, H. A., & Eltoukhy, A. E. (2025). Electronic Warfare Cyberattacks, Countermeasures and Modern Defensive Strategies of UAV Avionics: A Survey. IEEE Access.
[CrossRef] [Google Scholar] - Zheng, X., Wang, F., & Li, Z. (2018). A multi-UAV cooperative route planning methodology for 3D fine-resolution building model reconstruction. ISPRS journal of photogrammetry and remote sensing, 146, 483-494.
[CrossRef] [Google Scholar] - Zhu, X., Yan, R., Peng, R., & Zhang, Z. (2020). Optimal routing, loading and aborting of UAVs executing both visiting tasks and transportation tasks. Reliability Engineering & System Safety, 204, 107132.
[CrossRef] [Google Scholar] - Zhu, X., Zhu, X., Yan, R., & Peng, R. (2021). Optimal routing, aborting and hitting strategies of UAVs executing hitting the targets considering the defense range of targets. Reliability Engineering & System Safety, 215, 107811.
[CrossRef] [Google Scholar]
Cited By (4)
-
Xiaodian Zhuang, Xiuwen Fu, Liudong Xing, Rui Peng. Network recovery for UAV-assisted IoTs after cascading failures with heterogeneous graph neural networks.
Reliability Engineering & System Safety, 2026 , 273 .
[CrossRef] -
Amir Seyyedabbasi, Bahman Arasteh, Ahmet Gurhanli, Jawad Rasheed. Multi-strategy Sea Horse Optimization algorithm for UAV path planning.
Frontiers in Robotics and AI, 2026 , 13 .
[CrossRef] -
Lamaa Sellami, Bechir Alaya. Mitigating Mobility Uncertainty in Vehicular Cloud Networks Through Kalman Prediction and Evaluating Blockchain Protocol Security.
Journal of Network and Systems Management, 2026 , 34 (4).
[CrossRef] -
Kaustav Dey, Suman Debnath, Raj Kumar, Gaurav Arora, Papiya Bhowmik, Mohit Kumar, Vinod Ayyappan, Ravi Vijaykumar Sevak. Recent advances in machine learning based optimization of porous propeller aerodynamics for unmanned aerial vehicle systems.
Discover Mechanical Engineering, 2026 , 5 (1).
[CrossRef]
Cite This Article
TY - JOUR AU - Gao, Kaiye AU - Qu, Jun AU - Zhang, Guodong AU - Zhang, Wen AU - Liu, Bin AU - Gao, Yuan AU - Wu, Di PY - 2025 DA - 2025/07/31 TI - State-of-the-Art Advances and Emerging Challenges in UAV Routing Optimization: A Comprehensive Review JO - ICCK Transactions on Systems Safety and Reliability T2 - ICCK Transactions on Systems Safety and Reliability JF - ICCK Transactions on Systems Safety and Reliability VL - 1 IS - 1 SP - 43 EP - 62 DO - 10.62762/TSSR.2025.423261 UR - https://www.icck.org/article/abs/TSSR.2025.423261 KW - unmanned aerial vehicle KW - routing optimization KW - multi-objective mission planning KW - energy efficiency KW - communication protocols KW - environmental adaptation AB - This literature review offers an in-depth overview of recent advances in routing optimization for Unmanned Aerial Vehicles (UAVs), a field central to improving the performance, reliability, and flexibility of UAV systems. The review is organized into five categories: (1) multi-objective mission planning, (2) algorithmic design and optimization techniques, (3) energy efficiency and resource allocation, (4) communication protocols and network management, and (5) context-specific applications and environmental adaptability. The review highlights methodological progress and algorithmic approaches developed to balance competing demands such as mission effectiveness, energy use, and communication stability. Emphasis is placed on techniques that aim to extend UAV network longevity through effective energy strategies and on the creation of robust communication frameworks to support dependable data exchange. The study also considers how routing methods are being adapted to accommodate dynamic operational environments and varying external conditions. By drawing together insights from these areas, the review provides a comprehensive perspective on the current state of UAV routing optimization and identifies pressing challenges and directions for future research, with a focus on developing more adaptive and intelligent routing solutions. SN - 3069-1087 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Gao2025Stateofthe,
author = {Kaiye Gao and Jun Qu and Guodong Zhang and Wen Zhang and Bin Liu and Yuan Gao and Di Wu},
title = {State-of-the-Art Advances and Emerging Challenges in UAV Routing Optimization: A Comprehensive Review},
journal = {ICCK Transactions on Systems Safety and Reliability},
year = {2025},
volume = {1},
number = {1},
pages = {43-62},
doi = {10.62762/TSSR.2025.423261},
url = {https://www.icck.org/article/abs/TSSR.2025.423261},
abstract = {This literature review offers an in-depth overview of recent advances in routing optimization for Unmanned Aerial Vehicles (UAVs), a field central to improving the performance, reliability, and flexibility of UAV systems. The review is organized into five categories: (1) multi-objective mission planning, (2) algorithmic design and optimization techniques, (3) energy efficiency and resource allocation, (4) communication protocols and network management, and (5) context-specific applications and environmental adaptability. The review highlights methodological progress and algorithmic approaches developed to balance competing demands such as mission effectiveness, energy use, and communication stability. Emphasis is placed on techniques that aim to extend UAV network longevity through effective energy strategies and on the creation of robust communication frameworks to support dependable data exchange. The study also considers how routing methods are being adapted to accommodate dynamic operational environments and varying external conditions. By drawing together insights from these areas, the review provides a comprehensive perspective on the current state of UAV routing optimization and identifies pressing challenges and directions for future research, with a focus on developing more adaptive and intelligent routing solutions.},
keywords = {unmanned aerial vehicle, routing optimization, multi-objective mission planning, energy efficiency, communication protocols, environmental adaptation},
issn = {3069-1087},
publisher = {Institute of Central Computation and Knowledge}
}
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Portico
