Abstract
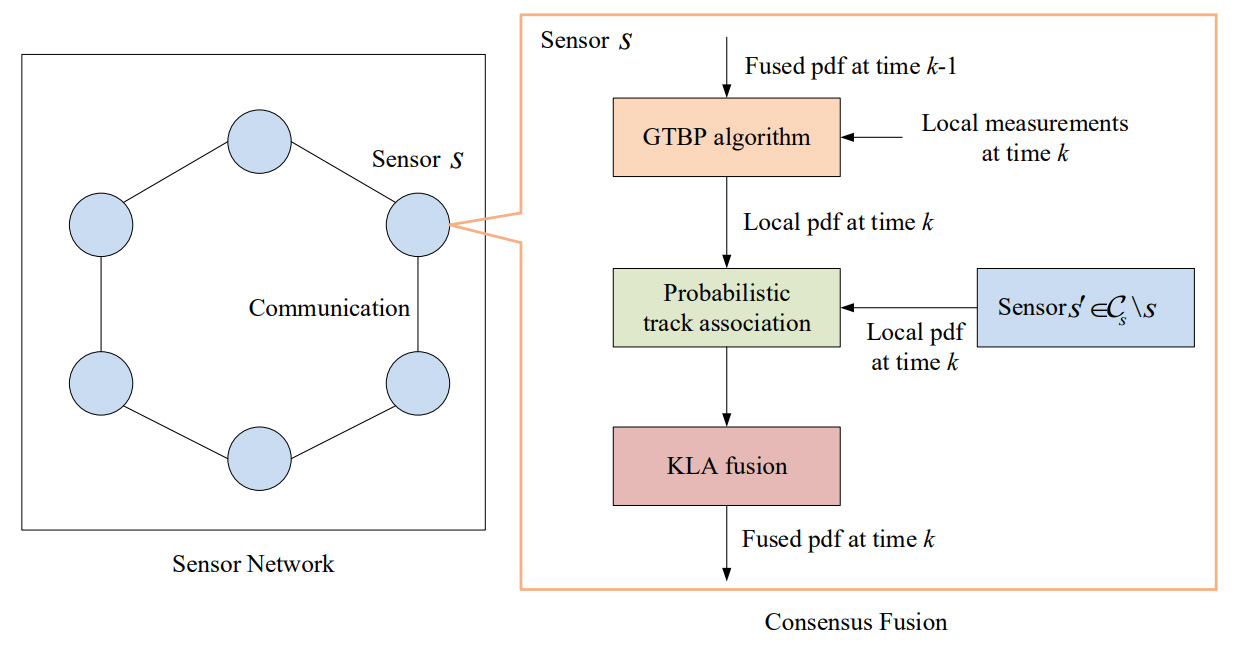
This paper considers the distributed group target tracking (DGTT) problem under sensors with limited and different field of views (FoVs). Usually, for the tracking of groups, targets within groups are closely spaced and move in a coordinated manner. These groups can split or merge, and the numbers of targets in groups may be large, which lead to more challenging issues related to data association, filtering and computational complexities. Particularly, these challenges may be further complicated in distributed fusion system architectures. To deal with these difficulties, we propose a consensus-based DGTT method within the belief propagation (BP) framework, which introduces undetected targets inside the FoV or new targets outside the FoV and performs the probabilistic track association via BP. Meanwhile, the obtained track association probabilities make it possible to exploit a probabilistic consensus fusion scheme for fusing local target densities. Furthermore, the proposed method exhibits computational scalability scaling only linearly on the numbers of group partitions, local measurements and neighboring sensors, and scaling quadratically on the number of targets. Numerical results validate the performance of the proposed method.
Keywords
group target tracking
distributed sensor network
consensus fusion
scalability
belief propagation
Data Availability Statement
Data will be made available on request.
Funding
This work was supported by the Natural Science Foundation of Sichuan Province under Grant 2025ZNSFSC0821 and the Special Fund for Postdoctoral Research Projects of Sichuan Province under Grant TB2024075.
Conflicts of Interest
The authors declare no conflicts of interest.
Ethical Approval and Consent to Participate
Not applicable.
Cite This Article
APA Style
Liu, H., Zhang, X., Zhou, B., Liu, B., & Shen, X. (2025). Distributed Group Target Tracking under Limited Field-of-View Sensors Using Belief Propagation. Chinese Journal of Information Fusion, 2(3), 194–211. https://doi.org/10.62762/CJIF.2025.314716
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Copyright © 2025 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (
https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.






 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue