Abstract
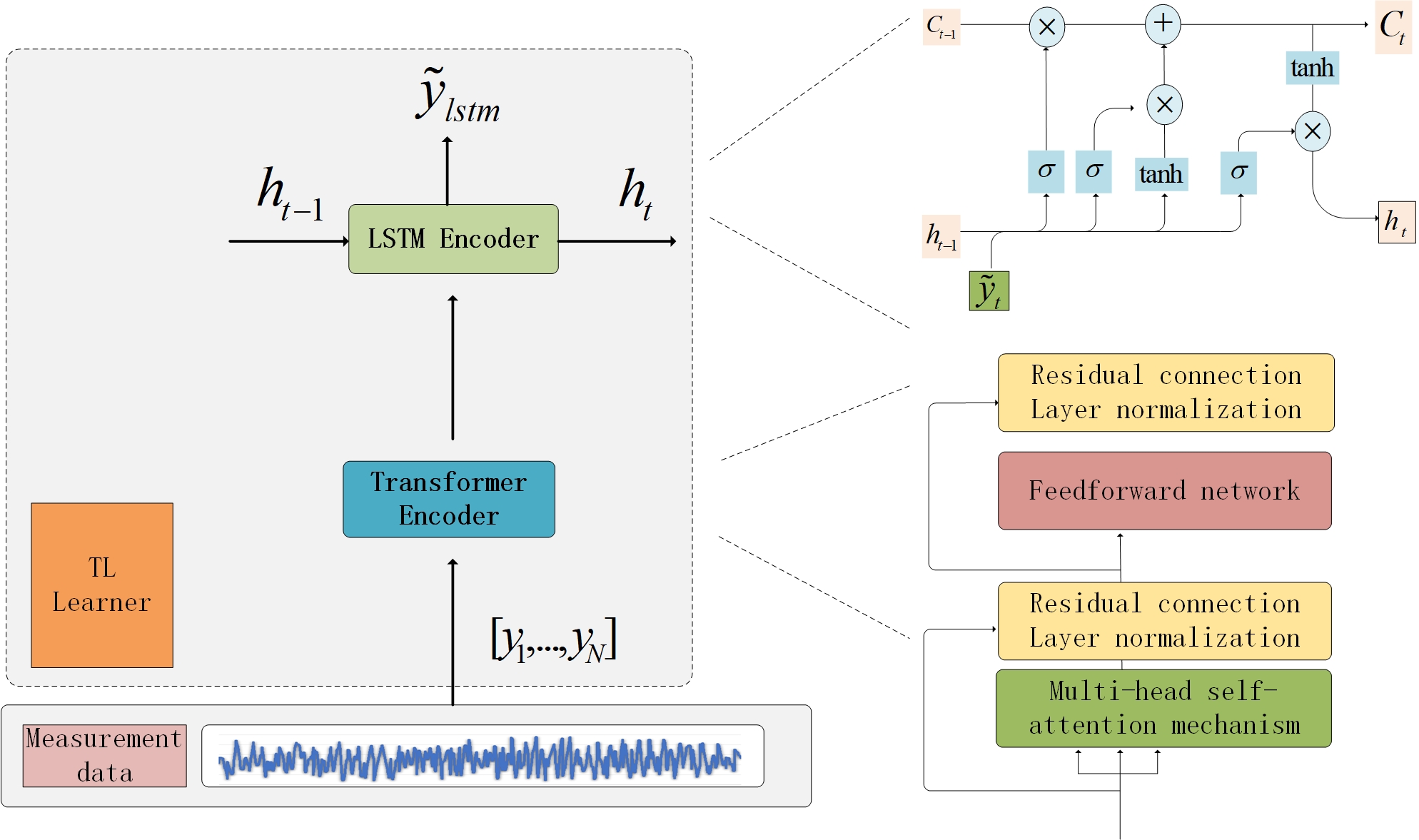
Nowadays, state estimation is widely used in fields such as autonomous driving and drone navigation. However, in practical applications, it is difficult to obtain accurate target motion models and noise covariance.This leads to a decrease in the estimation accuracy of traditional Kalman filters. To address this issue, this paper proposes an adaptive model free state estimation method based on attention parameter learning module. This method combines Transformer's encoder with Long Short Term Memory Network (LSTM), and obtains the system's operational characteristics through offline learning of measurement data without modeling the system dynamics and measurement characteristics. In addition, based on the output of the attention learning module, the expectation maximization (EM) algorithm is used to estimate the system model parameters online, and a Kalman filter is used to obtain state estimation. This paper was validated using the GPS trajectory path dataset, and the experimental results showed that the proposed parameter adaptive model free state estimation method has better estimation accuracy than other models, providing an effective method for using deep learning networks for state estimation.
Funding
This work was supported without any funding.
Cite This Article
APA Style
Jin, X., Sun, T., Chen, W., Ma, H., Wang, Y., & Zheng, Y. (2024). Parameter Adaptive Non-Model-Based State Estimation Combining Attention Mechanism and LSTM. ICCK Transactions on Intelligent Systematics, 1(1), 40–48. https://doi.org/10.62762/TIS.2024.137329
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Central Computation and Knowledge (ICCK) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.






 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue