Design of Low-Altitude Air Route Networks with Robustness Boundary via Reinforcement Learning
Article Information
Abstract
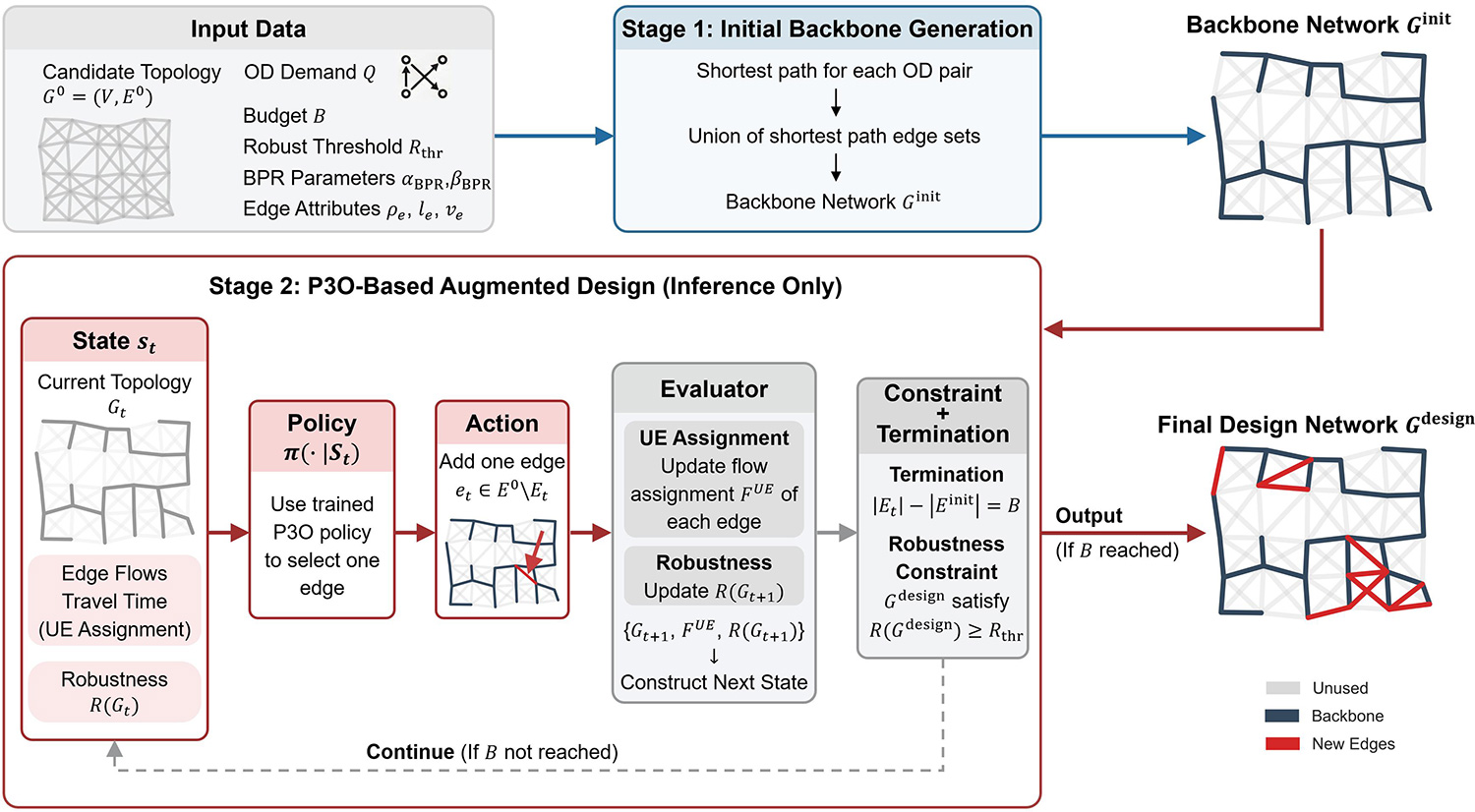
The rapid expansion of the low-altitude economy is reshaping urban transportation systems, while large-scale operations of dynamic and high-density low-altitude unmanned aerial vehicles pose significant challenges to performance and robustness of airspace infrastructure. Traditional free-flight and point-to-point paradigms have revealed inherent limitations in conflict resolution and congestion mitigation, making the construction of adaptive, structured, and dynamic low-altitude air route networks a critical pathway to achieve both route controllability and efficient operation. However, existing design approaches may struggle to rapidly adapt to dynamic flight requirements while ensuring high system performance. Increasing demands for robustness further complicates design of air route networks, necessitating a trade-off between performance and robustness. To address this coupled challenge, a two-stage design framework is proposed based on safe reinforcement learning (safe RL), enabling the automated construction of low-altitude air route networks with high performance and permissible robustness. The framework first constructs an initial backbone network using the shortest path sets derived from origin-destination (OD) demands to guarantee basic accessibility. Then, the initial backbone network is augmented by adding a given number of edges, which is formulated as a constrained Markov decision process (CMDP). By integrating the representation capability of graph neural networks (GNNs) with the constraint-handling mechanism of safe RL, the framework achieves adaptive network design that improves system travel performance under the robustness constraint. Experimental results in Washington demonstrate that the proposed method can effectively design air route networks across different OD scenarios. Embedding the robustness constraint into the reinforcement learning (RL)-based design paradigm, this approach provides a potential pathway for the automated design of next-generation critical infrastructure for low-altitude transportation with high performance and permissible robustness.
Graphical Abstract
Keywords
Data Availability Statement
Funding
Conflicts of Interest
AI Use Statement
Ethical Approval and Consent to Participate
References
- Hamissi, A., & Dhraief, A. (2023). A survey on the unmanned aircraft system traffic management. ACM Computing Surveys, 56(3), 1–37.
[CrossRef] [Google Scholar] - Bauranov, A., & Rakas, J. (2021). Designing airspace for urban air mobility: A review of concepts and approaches. Progress in Aerospace Sciences, 125, 100726.
[CrossRef] [Google Scholar] - Xu, C., Liao, X., Ye, H., & Yue, H. (2020). Iterative construction of low-altitude UAV air route network in urban areas: Case planning and assessment. Journal of Geographical Sciences, 30(9), 1534–1552.
[CrossRef] [Google Scholar] - Lee, U. J., Ahn, S. J., Choi, D. Y., Chin, S. M., & Jang, D. S. (2023). Airspace designs and operations for uas traffic management at low altitude. Aerospace, 10(9), 737.
[CrossRef] [Google Scholar] - Zhang, Z., Zheng, Y., Li, C., Jiang, B., & Li, Y. (2025). Designing an Urban Air Mobility Corridor Network: A Multi-Objective Optimization Approach Using U-NSGA-III. Aerospace, 12(3), 229.
[CrossRef] [Google Scholar] - Zhai, W., Han, B., Li, D., Duan, J., & Cheng, C. (2021). A low-altitude public air route network for UAV management constructed by global subdivision grids. PLoS One, 16(4), e0249680.
[CrossRef] [Google Scholar] - Wang, Z., Delahaye, D., Farges, J. L., & Alam, S. (2022, June). Route network design in low-altitude airspace for future urban air mobility operations: A case study of urban airspace of Singapore. In International Conference on Research in Air Transportation (ICRAT 2020).
[Google Scholar] - Lozano Tafur, C., Orduy Rodríguez, J., Aldana Rodríguez, D., Traslaviña, D. S., Fernández Valencia, S., & Celis Ardila, F. H. (2025). Risk-Based Design of Urban UAS Corridors. Drones, 9(12), 815.
[CrossRef] [Google Scholar] - Zhang, H., Tian, T., Feng, O., Wu, S., & Zhong, G. (2023). Research on public air route network planning of urban low-altitude logistics unmanned aerial vehicles. Sustainability, 15(15), 12021.
[CrossRef] [Google Scholar] - Stuive, L., & Gzara, F. (2024). Airspace network design for urban UAV traffic management with congestion. Transportation Research Part C: Emerging Technologies, 169, 104882.
[CrossRef] [Google Scholar] - Li, Z., Li, S., Lu, J., & Wang, S. (2025). Air Route Network Planning Method of Urban Low-Altitude Logistics UAV with Double-Layer Structure. Drones, 9(3), 193.
[CrossRef] [Google Scholar] - Patriksson, M. (2015). The traffic assignment problem: models and methods. Courier Dover Publications.
[Google Scholar] - Albert, R., Jeong, H., & Barabási, A. L. (2000). Error and attack tolerance of complex networks. nature, 406(6794), 378-382.
[CrossRef] [Google Scholar] - Wandelt, S., Sun, X., Feng, D., Zanin, M., & Havlin, S. (2018). A comparative analysis of approaches to network-dismantling. Scientific Reports, 8(1), 13513.
[CrossRef] [Google Scholar] - Darvariu, V. A., Hailes, S., & Musolesi, M. (2024). Graph reinforcement learning for combinatorial optimization: A survey and unifying perspective. arXiv preprint arXiv:2404.06492.
[Google Scholar] - Cappart, Q., Chételat, D., Khalil, E. B., Lodi, A., Morris, C., & Veličković, P. (2023). Combinatorial optimization and reasoning with graph neural networks. Journal of Machine Learning Research, 24(130), 1–61.
[Google Scholar] - Mazyavkina, N., Sviridov, S., Ivanov, S., & Burnaev, E. (2021). Reinforcement learning for combinatorial optimization: A survey. Computers & Operations Research, 134, 105400.
[CrossRef] [Google Scholar] - Zhao, W., He, T., Chen, R., Wei, T., & Liu, C. (2023). State-wise safe reinforcement learning: A survey. arXiv preprint arXiv:2302.03122.
[Google Scholar] - Liu, Y., Halev, A., & Liu, X. (2021, August). Policy learning with constraints in model-free reinforcement learning: A survey. In The 30th international joint conference on artificial intelligence (ijcai).
[CrossRef] [Google Scholar] - Achiam, J., Held, D., Tamar, A., & Abbeel, P. (2017, July). Constrained policy optimization. In International conference on machine learning (pp. 22-31). Pmlr.
[Google Scholar] - Stooke, A., Achiam, J., & Abbeel, P. (2020, November). Responsive safety in reinforcement learning by pid lagrangian methods. In International conference on machine learning (pp. 9133-9143). PMLR.
[Google Scholar] - Li, J., Fridovich-Keil, D., Sojoudi, S., & Tomlin, C. J. (2021, December). Augmented lagrangian method for instantaneously constrained reinforcement learning problems. In 2021 60th IEEE Conference on Decision and Control (CDC) (pp. 2982-2989). IEEE.
[CrossRef] [Google Scholar] - Wen, L., Duan, J., Li, S. E., Xu, S., & Peng, H. (2020, September). Safe reinforcement learning for autonomous vehicles through parallel constrained policy optimization. In 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC) (pp. 1-7). IEEE.
[CrossRef] [Google Scholar] - Wang, W., Yu, N., Gao, Y., & Shi, J. (2019). Safe off-policy deep reinforcement learning algorithm for volt-var control in power distribution systems. IEEE Transactions on Smart Grid, 11(4), 3008–3018.
[CrossRef] [Google Scholar] - Tessler, C., Mankowitz, D. J., & Mannor, S. (2018). Reward constrained policy optimization. arXiv preprint arXiv:1805.11074.
[Google Scholar] - Xu, C., Ye, H., Yue, H., Tan, X., & Liao, X. (2020). Iterative construction of UAV low-altitude air route network in an urbanized region: theoretical system and technical roadmap. Acta Geogr. Sin, 75, 917–930.
[Google Scholar] - Gao, C. F., Hu, Z. H., & Wang, Y. Z. (2022). Optimizing the hub-and-spoke network with drone-based traveling salesman problem. Drones, 7(1), 6.
[CrossRef] [Google Scholar] - Leurent, F., & Boujnah, H. (2014). A user equilibrium, traffic assignment model of network route and parking lot choice, with search circuits and cruising flows. Transportation Research Part C: Emerging Technologies, 47, 28–46.
[CrossRef] [Google Scholar] - Morandi, V. (2024). Bridging the user equilibrium and the system optimum in static traffic assignment: a review. 4OR, 22(1), 89–119.
[CrossRef] [Google Scholar] - Wardrop, J. G. (1952). Road paper. some theoretical aspects of road traffic research. Proceedings of the institution of civil engineers, 1(3), 325–362.
[CrossRef] [Google Scholar] - Salazar, M., Tsao, M., Aguiar, I., Schiffer, M., & Pavone, M. (2019, June). A congestion-aware routing scheme for autonomous mobility-on-demand systems. In 2019 18th European Control Conference (ECC) (pp. 3040-3046). IEEE.
[CrossRef] [Google Scholar] - Aftabuzzaman, M. (2007, September). Measuring traffic congestion-a critical review. In 30th Australasian transport research forum (Vol. 1). ETM GROUP London UK.
[Google Scholar] - Daskin, M. S. (1985). Urban transportation networks: Equilibrium analysis with mathematical programming methods.
[Google Scholar] - Schneider, C. M., Moreira, A. A., Andrade Jr, J. S., Havlin, S., & Herrmann, H. J. (2011). Mitigation of malicious attacks on networks. Proceedings of the National Academy of Sciences, 108(10), 3838-3841.
[CrossRef] [Google Scholar] - Holme, P., Kim, B. J., Yoon, C. N., & Han, S. K. (2002). Attack vulnerability of complex networks. Physical review E, 65(5), 056109.
[CrossRef] [Google Scholar] - Garcıa, J., & Fernández, F. (2015). A comprehensive survey on safe reinforcement learning. Journal of Machine Learning Research, 16(1), 1437-1480.
[Google Scholar] - Ray, A., Achiam, J., & Amodei, D. (2019). Benchmarking safe exploration in deep reinforcement learning. arXiv preprint arXiv:1910.01708, 7(1), 2.
[Google Scholar] - Altman, E. (2021). Constrained Markov decision processes. Routledge.
[CrossRef] [Google Scholar] - Ding, D., Zhang, K., Basar, T., & Jovanovic, M. R. (2020, December). Natural policy gradient primal-dual method for constrained Markov decision processes. In Proceedings of the 34th International Conference on Neural Information Processing Systems (pp. 8378-8390).
[Google Scholar] - Chow, Y., Nachum, O., Duenez-Guzman, E., & Ghavamzadeh, M. (2018, December). A lyapunov-based approach to safe reinforcement learning. In Proceedings of the 32nd International Conference on Neural Information Processing Systems (pp. 8103-8112).
[Google Scholar] - Achiam, J., Held, D., Tamar, A., & Abbeel, P. (2017, July). Constrained policy optimization. In International conference on machine learning (pp. 22-31). Pmlr.
[Google Scholar] - Xuan, C., Zhang, F., Yin, F., & Lam, H. K. (2023). Constrained proximal policy optimization. arXiv preprint arXiv:2305.14216.
[Google Scholar] - Dai, J., Ji, J., Yang, L., Zheng, Q., & Pan, G. (2023). Augmented proximal policy optimization for safe reinforcement learning. In Proceedings of the AAAI Conference on Artificial Intelligence (pp. 7288–7295).
[CrossRef] [Google Scholar] - Schulman, J., Levine, S., Abbeel, P., Jordan, M., & Moritz, P. (2015, June). Trust region policy optimization. In International conference on machine learning (pp. 1889-1897). PMLR.
[Google Scholar] - Schulman, J., Wolski, F., Dhariwal, P., Radford, A., & Klimov, O. (2017). Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347.
[Google Scholar] - Yu, M., Yang, Z., Kolar, M., & Wang, Z. (2019, December). Convergent policy optimization for safe reinforcement learning. In Proceedings of the 33rd International Conference on Neural Information Processing Systems (pp. 3127-3139).
[Google Scholar] - Zhang, L., Shen, L., Yang, L., Chen, S., Yuan, B., Wang, X., & Tao, D. (2022). Penalized proximal policy optimization for safe reinforcement learning. arXiv preprint arXiv:2205.11814.
[Google Scholar] - Cai, T., Luo, S., Xu, K., He, D., Liu, T. Y., & Wang, L. (2021, July). Graphnorm: A principled approach to accelerating graph neural network training. In International Conference on Machine Learning (pp. 1204-1215). PMLR.
[Google Scholar] - Brody, S., Alon, U., & Yahav, E. (2021). How attentive are graph attention networks?. arXiv preprint arXiv:2105.14491.
[Google Scholar] - Nair, V., & Hinton, G. E. (2010, June). Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on International Conference on Machine Learning (pp. 807-814).
[Google Scholar] - Maas, A. L., Hannun, A. Y., & Ng, A. Y. (2013, June). Rectifier nonlinearities improve neural network acoustic models. In Proc. icml (Vol. 30, No. 1, p. 3).
[Google Scholar] - Janner, M., Li, Q., & Levine, S. (2021). Offline reinforcement learning as one big sequence modeling problem. Advances in neural information processing systems, 34, 1273-1286.
[Google Scholar] - Bomze, I. M., Mertikopoulos, P., Schachinger, W., & Staudigl, M. (2019). Hessian barrier algorithms for linearly constrained optimization problems. SIAM Journal on Optimization, 29(3), 2100-2127.
[CrossRef] [Google Scholar] - Alumur, S., & Kara, B. Y. (2008). Network hub location problems: The state of the art. European journal of operational research, 190(1), 1–21.
[CrossRef] [Google Scholar] - Anda, C., Erath, A., & Fourie, P. J. (2017). Transport modelling in the age of big data. International Journal of Urban Sciences, 21(sup1), 19-42.
[CrossRef] [Google Scholar] - Immers, L., & Stada, J. (1998). Traffic demand modelling. Katholieke Universiteit Leuven.
[Google Scholar] - Fávero, L. P., Belfiore, P., & de Freitas Souza, R. (2023). Data science, analytics and machine learning with R. Academic Press.
[CrossRef] [Google Scholar] - Bertsimas, D., & Tsitsiklis, J. (1993). Simulated annealing. Statistical science, 8(1), 10–15.
[CrossRef] [Google Scholar] - Buesser, P., Daolio, F., & Tomassini, M. (2011, April). Optimizing the robustness of scale-free networks with simulated annealing. In International conference on adaptive and natural computing algorithms (pp. 167-176). Berlin, Heidelberg: Springer Berlin Heidelberg.
[CrossRef] [Google Scholar] - Wandelt, S., Lin, W., Sun, X., & Zanin, M. (2022). From random failures to targeted attacks in network dismantling. Reliability Engineering & System Safety, 218, 108146.
[CrossRef] [Google Scholar] - Shekhtman, L. M., Danziger, M. M., Vaknin, D., & Havlin, S. (2018). Robustness of spatial networks and networks of networks. Comptes Rendus Physique, 19(4), 233–243.
[CrossRef] [Google Scholar] - Wang, Z., Delahaye, D., Farges, J. L., & Alam, S. (2022). Complexity optimal air traffic assignment in multi-layer transport network for Urban Air Mobility operations. Transportation Research Part C: Emerging Technologies, 142, 103776.
[CrossRef] [Google Scholar] - Shi, Z., & Ng, W. K. (2018, June). A collision-free path planning algorithm for unmanned aerial vehicle delivery. In 2018 international conference on unmanned aircraft systems (icuas) (pp. 358-362). IEEE.
[CrossRef] [Google Scholar] - Sun, L., Deng, H., Wei, P., & Xie, W. (2025). On a fair and risk-averse urban air mobility resource allocation problem under demand and capacity uncertainties. Naval Research Logistics (NRL), 72(1), 111–132.
[CrossRef] [Google Scholar] - Dong, S., Wang, H., Mostafavi, A., & Gao, J. (2019). Robust component: a robustness measure that incorporates access to critical facilities under disruptions. Journal of The Royal Society Interface, 16(157).
[CrossRef] [Google Scholar] - Fu, H., Akamatsu, T., Satsukawa, K., & Wada, K. (2022). Dynamic traffic assignment in a corridor network: Optimum versus equilibrium. Transportation Research Part B: Methodological, 161, 218–246.
[CrossRef] [Google Scholar] - Batista, S. F. A., Leclercq, L., & Menéndez, M. (2021). Dynamic Traffic Assignment for regional networks with traffic-dependent trip lengths and regional paths. Transportation Research Part C: Emerging Technologies, 127, 103076.
[CrossRef] [Google Scholar] - Gao, Z., Yu, Y., Wei, Q., Topcu, U., & Clarke, J. P. (2024). Noise-aware and equitable urban air traffic management: An optimization approach. Transportation Research Part C: Emerging Technologies, 165, 104740.
[CrossRef] [Google Scholar] - Liang, M., Xu, M., & Wang, S. (2025). A novel multi-objective evolutionary algorithm for transit network design and frequency-setting problem considering passengers’ choice behaviors under station congestion. Transportation Research Part B: Methodological, 197, 103238.
[CrossRef] [Google Scholar] - Wachi, A., Shen, X., & Sui, Y. (2024). A survey of constraint formulations in safe reinforcement learning. arXiv preprint arXiv:2402.02025.
[Google Scholar] - Stuive, L., & Gzara, F. (2024). Airspace network design for urban UAV traffic management with congestion. Transportation Research Part C: Emerging Technologies, 169, 104882.
[CrossRef] [Google Scholar] - Gao, C. F., Hu, Z. H., & Wang, Y. Z. (2022). Optimizing the hub-and-spoke network with drone-based traveling salesman problem. Drones, 7(1), 6.
[CrossRef] [Google Scholar] - Wu, W., Wang, Z., Lin, L., Chang, X., & Tian, L. (2025). An efficient coverage path planning method for UAV in complex concave regions. Scientific Reports, 15(1), 37227.
[CrossRef] [Google Scholar] - Salazar, M., Tsao, M., Aguiar, I., Schiffer, M., & Pavone, M. (2019, June). A congestion-aware routing scheme for autonomous mobility-on-demand systems. In 2019 18th European Control Conference (ECC) (pp. 3040-3046). IEEE.
[CrossRef] [Google Scholar] - Gore, N., Arkatkar, S., Joshi, G., & Antoniou, C. (2023). Modified bureau of public roads link function. Transportation Research Record, 2677(7), 966–990.
[CrossRef] [Google Scholar] - Gentile, G. (2016). Solving a dynamic user equilibrium model based on splitting rates with gradient projection algorithms. Transportation Research Part B: Methodological, 92, 120-147.
[CrossRef] [Google Scholar] - Yang, H., & Bell, M. G. H. (1998). Models and algorithms for road network design: a review and some new developments. Transport Reviews, 18(3), 257–278.
[CrossRef] [Google Scholar] - Morandi, V. (2024). Bridging the user equilibrium and the system optimum in static traffic assignment: a review. 4OR, 22(1), 89–119.
[CrossRef] [Google Scholar] - Marechal, M., & de Grange, L. (2024). Generalization of Beckmann’s transformation for traffic assignment models with asymmetric cost functions. Journal of Advanced Transportation, 2024(1), 2921485.
[CrossRef] [Google Scholar] - AequilibraE. (2026). Traffic assignment procedure. Retrieved January 22, 2026, from https://www.aequilibrae.com/develop/python/traffic_assignment/assignment_procedures.html
[Google Scholar] - Patro, S. G. O. P. A. L., & Sahu, K. K. (2015). Normalization: A preprocessing stage. arXiv preprint arXiv:1503.06462.
[Google Scholar] - Liu, M., Zhu, M., & Zhang, W. (2022). Goal-conditioned reinforcement learning: Problems and solutions. arXiv preprint arXiv:2201.08299.
[Google Scholar] - Zhang, L., Shen, L., Yang, L., Chen, S., Yuan, B., Wang, X., & Tao, D. (2022). Penalized proximal policy optimization for safe reinforcement learning. arXiv preprint arXiv:2205.11814.
[Google Scholar] - Schulman, J., Moritz, P., Levine, S., Jordan, M., & Abbeel, P. (2015). High-dimensional continuous control using generalized advantage estimation. arXiv preprint arXiv:1506.02438.
[Google Scholar]
Cite This Article
TY - JOUR AU - Zhu, Bingyu AU - Li, Shanghan AU - Liu, Yimeng PY - 2026 DA - 2026/03/23 TI - Design of Low-Altitude Air Route Networks with Robustness Boundary via Reinforcement Learning JO - ICCK Transactions on Systems Safety and Reliability T2 - ICCK Transactions on Systems Safety and Reliability JF - ICCK Transactions on Systems Safety and Reliability VL - 2 IS - 2 SP - 54 EP - 81 DO - 10.62762/TSSR.2026.164131 UR - https://www.icck.org/article/abs/TSSR.2026.164131 KW - low-altitude air route network KW - network design KW - network robustness KW - safe reinforcement learning AB - The rapid expansion of the low-altitude economy is reshaping urban transportation systems, while large-scale operations of dynamic and high-density low-altitude unmanned aerial vehicles pose significant challenges to performance and robustness of airspace infrastructure. Traditional free-flight and point-to-point paradigms have revealed inherent limitations in conflict resolution and congestion mitigation, making the construction of adaptive, structured, and dynamic low-altitude air route networks a critical pathway to achieve both route controllability and efficient operation. However, existing design approaches may struggle to rapidly adapt to dynamic flight requirements while ensuring high system performance. Increasing demands for robustness further complicates design of air route networks, necessitating a trade-off between performance and robustness. To address this coupled challenge, a two-stage design framework is proposed based on safe reinforcement learning (safe RL), enabling the automated construction of low-altitude air route networks with high performance and permissible robustness. The framework first constructs an initial backbone network using the shortest path sets derived from origin-destination (OD) demands to guarantee basic accessibility. Then, the initial backbone network is augmented by adding a given number of edges, which is formulated as a constrained Markov decision process (CMDP). By integrating the representation capability of graph neural networks (GNNs) with the constraint-handling mechanism of safe RL, the framework achieves adaptive network design that improves system travel performance under the robustness constraint. Experimental results in Washington demonstrate that the proposed method can effectively design air route networks across different OD scenarios. Embedding the robustness constraint into the reinforcement learning (RL)-based design paradigm, this approach provides a potential pathway for the automated design of next-generation critical infrastructure for low-altitude transportation with high performance and permissible robustness. SN - 3069-1087 PB - Institute of Central Computation and Knowledge LA - English ER -
@article{Zhu2026Design,
author = {Bingyu Zhu and Shanghan Li and Yimeng Liu},
title = {Design of Low-Altitude Air Route Networks with Robustness Boundary via Reinforcement Learning},
journal = {ICCK Transactions on Systems Safety and Reliability},
year = {2026},
volume = {2},
number = {2},
pages = {54-81},
doi = {10.62762/TSSR.2026.164131},
url = {https://www.icck.org/article/abs/TSSR.2026.164131},
abstract = {The rapid expansion of the low-altitude economy is reshaping urban transportation systems, while large-scale operations of dynamic and high-density low-altitude unmanned aerial vehicles pose significant challenges to performance and robustness of airspace infrastructure. Traditional free-flight and point-to-point paradigms have revealed inherent limitations in conflict resolution and congestion mitigation, making the construction of adaptive, structured, and dynamic low-altitude air route networks a critical pathway to achieve both route controllability and efficient operation. However, existing design approaches may struggle to rapidly adapt to dynamic flight requirements while ensuring high system performance. Increasing demands for robustness further complicates design of air route networks, necessitating a trade-off between performance and robustness. To address this coupled challenge, a two-stage design framework is proposed based on safe reinforcement learning (safe RL), enabling the automated construction of low-altitude air route networks with high performance and permissible robustness. The framework first constructs an initial backbone network using the shortest path sets derived from origin-destination (OD) demands to guarantee basic accessibility. Then, the initial backbone network is augmented by adding a given number of edges, which is formulated as a constrained Markov decision process (CMDP). By integrating the representation capability of graph neural networks (GNNs) with the constraint-handling mechanism of safe RL, the framework achieves adaptive network design that improves system travel performance under the robustness constraint. Experimental results in Washington demonstrate that the proposed method can effectively design air route networks across different OD scenarios. Embedding the robustness constraint into the reinforcement learning (RL)-based design paradigm, this approach provides a potential pathway for the automated design of next-generation critical infrastructure for low-altitude transportation with high performance and permissible robustness.},
keywords = {low-altitude air route network, network design, network robustness, safe reinforcement learning},
issn = {3069-1087},
publisher = {Institute of Central Computation and Knowledge}
}
Article Metrics
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Portico
