Abstract
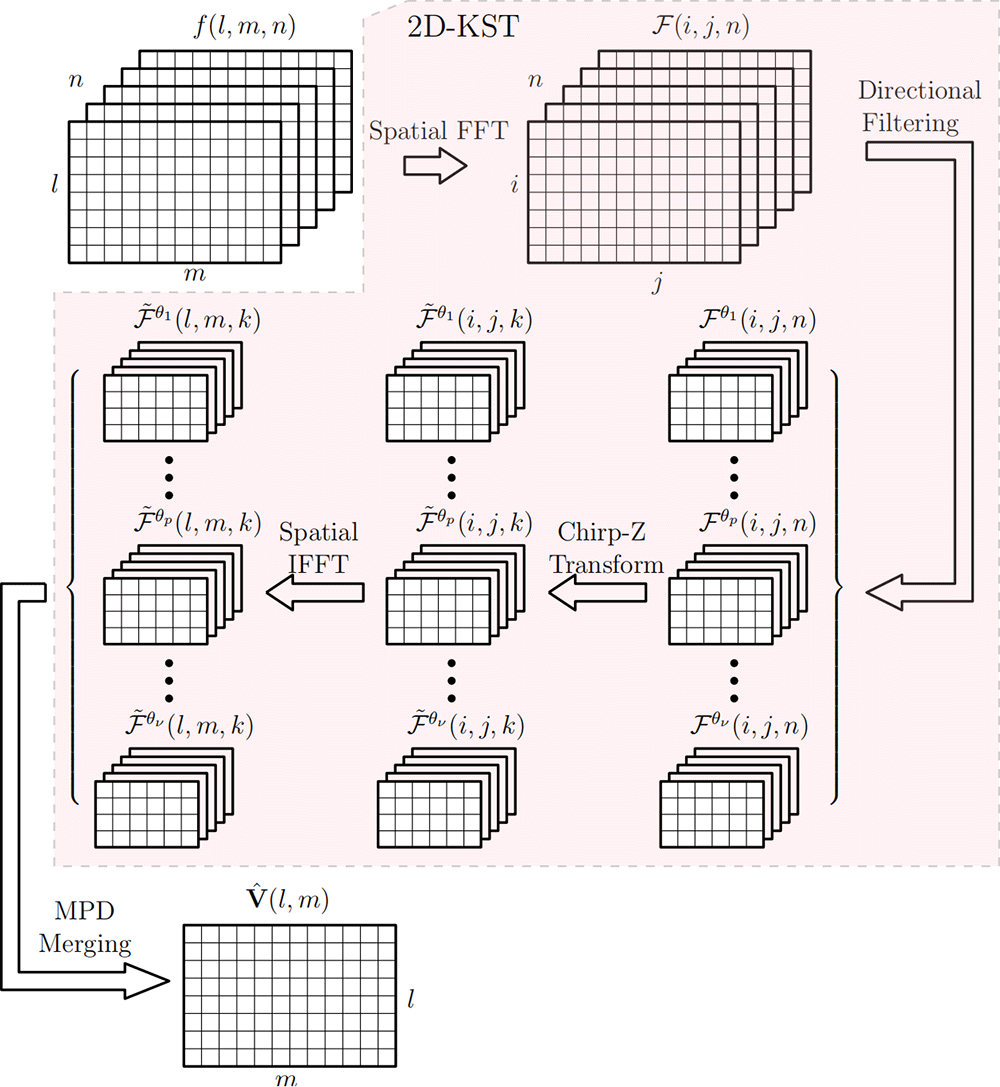
Considering the tractability of OGM (Occupancy Grid Map) and its wide use in the dynamic environment representation of mobile robotics, the extraction of motion information from successive OGMs are very important for many tasks, such as SLAM (Simultaneously Localization And Mapping), DATMO (Detection and Tracking of Moving Object) and informaiton fusion for situation awareness. In this paper, we propose a novel motion extraction method based on the signal transform, called as S-KST (Spatial Keystone Transform), for the motion detection and estimation from successive noisy OGMs. It extends the KST in radar imaging or motion compensation to 1D spatial case (1DS-KST) and 2D spatial case (2DS-KST) combined multiple hypotheses about possible directions of moving obstacles. Meanwhile, the fast algorithm of 2DS-KST based on Chirp Z-Transform (CZT) is also given, which five steps, i.e. spatial FFT, directional filtering, CZT, spatial IFFT and Maximal Power Detector (MPD) merging and its computational complexity is proportional to the 2D-FFT. Simulation test results for the point objects and the extended objects show that SKST has a good performance on the extraction of sub-pixel motions in very noisy environment, especially for those slowly moving obstacles.
Keywords
mobile robotics
occupancy grid map
moving object
keystone transform
2DS-KST
velocity estimation
situation informaiton fusion
Data Availability Statement
Data will be made available on request.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grant 62303478; in part by the ATR Foundation under Grant 2035250204; in part by the Key Lab. Foundation under Grant 220302.
Conflicts of Interest
The authors declare no conflicts of interest.
Ethical Approval and Consent to Participate
Not applicable.
Cite This Article
APA Style
Fan, H., Lu, D., Jiang, Y., & Lilienthal, A. J. (2024). Extraction of Motion Information from Occupancy Grid Map Using Keystone Transform. Chinese Journal of Information Fusion, 1(1), 63–78. https://doi.org/10.62762/CJIF.2024.361892
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions

Copyright © 2024 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (
https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.




 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue