Journal of Reliable and Secure Computing | Volume 1, Issue 1: 54-67, 2025 | DOI: 10.62762/JRSC.2025.368867
Abstract
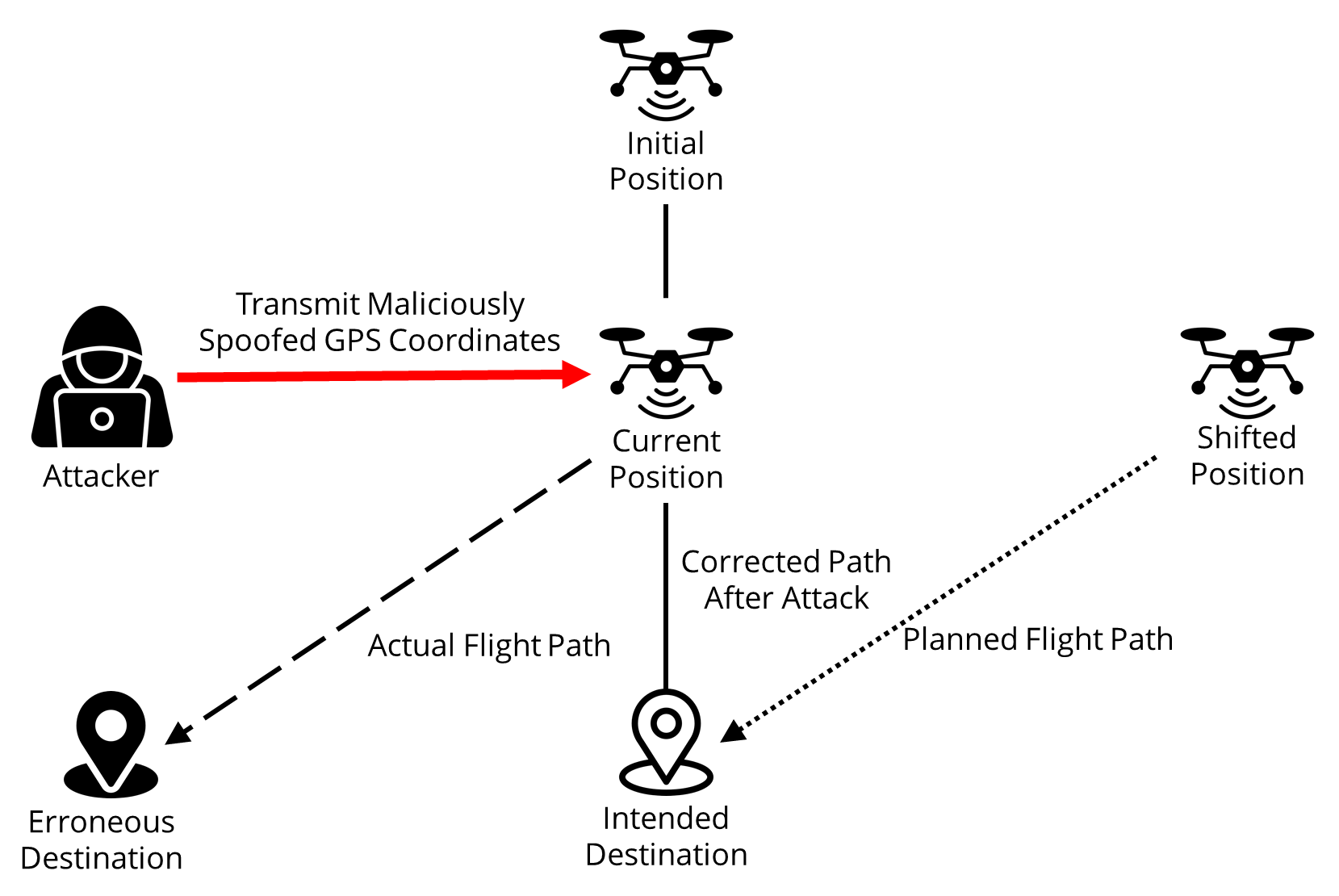
Unmanned aerial vehicles face GPS spoofing and jamming that can compromise navigation and safety. We present an anomaly detection method that achieves both high accuracy and interpretability, enabling UAV operators to understand why an alert is triggered, which enables timely responses and builds trust in autonomous detection systems operating in safety-critical environments. We use five classifiers, including XGBoost, Support Vector Machine, K-Nearest Neighbor, Random Forest, and Naive Bayes, trained on a UAV dataset containing 3622 samples for spoofing detection and 6445 for jamming detection made in PX4 and Gazebo with benign flight and attack cases. After feature scaling and reduction, X... More >
Graphical Abstract