by
Aerospace Engineering Communications | Volume 1, Issue 2: 87-92, 2026 | DOI: 10.62762/AEC.2026.392649
Abstract
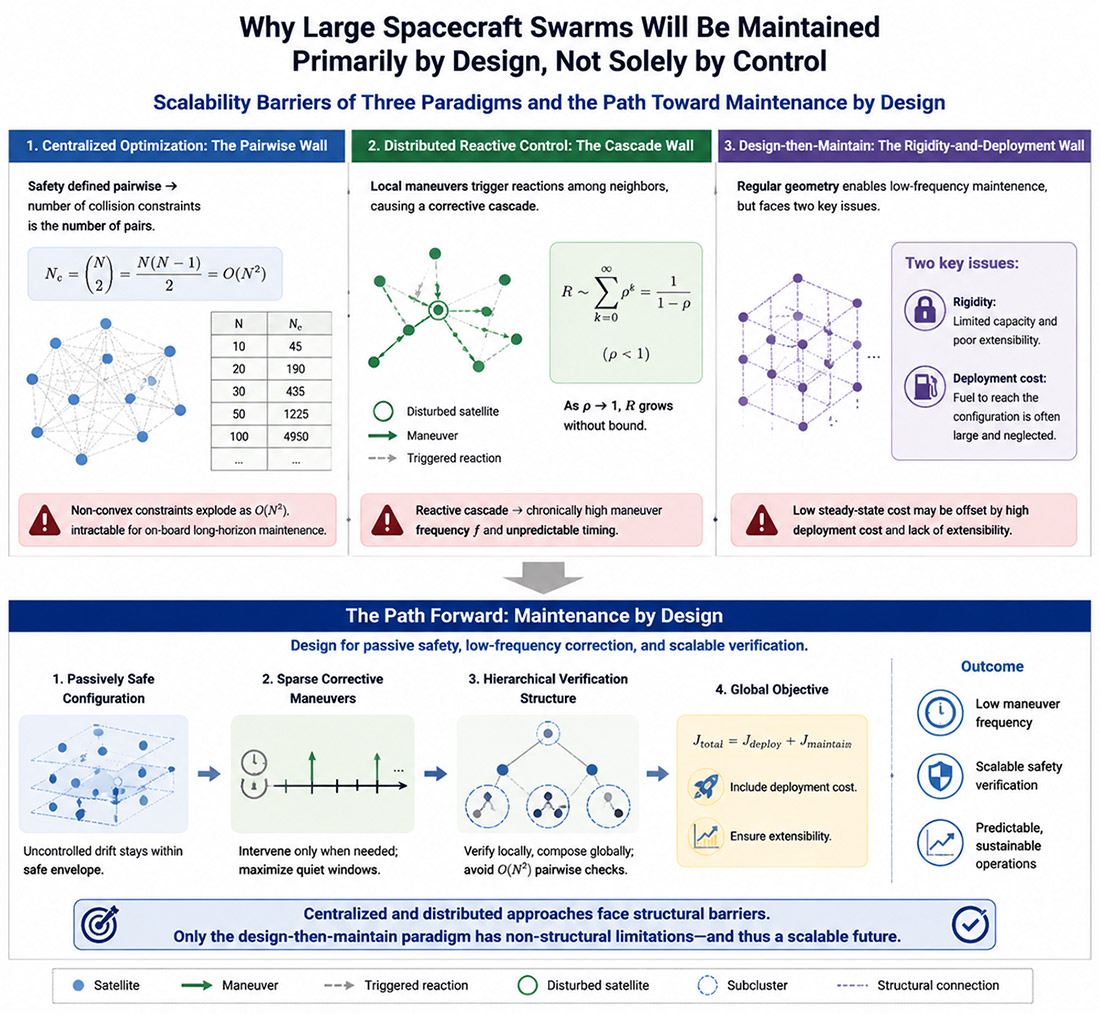
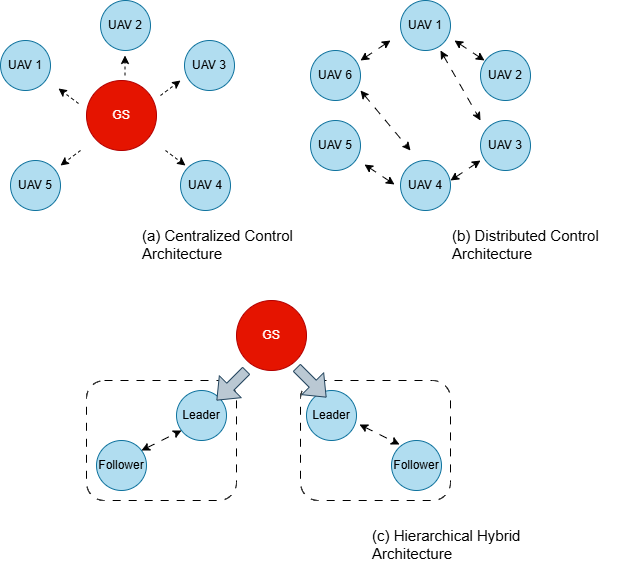
As orbital swarms grow toward populations of tens to hundreds, long-term maintenance changes character. We argue that it is distinct from reconfiguration or trajectory planning, defined by two requirements: it is perpetual, and it must be low-frequency, because every active maneuver arc is stolen from the payload's working time. Against these requirements the three dominant paradigms: centralized planning, distributed reactive control, and configuration design-then-maintain, fail in qualitatively different ways. Two of these failures are structural, properties of how the problem is posed; only the third is fixable. We therefore contend that scalable swarm maintenance will be achieved primari... More >
Graphical Abstract