Abstract
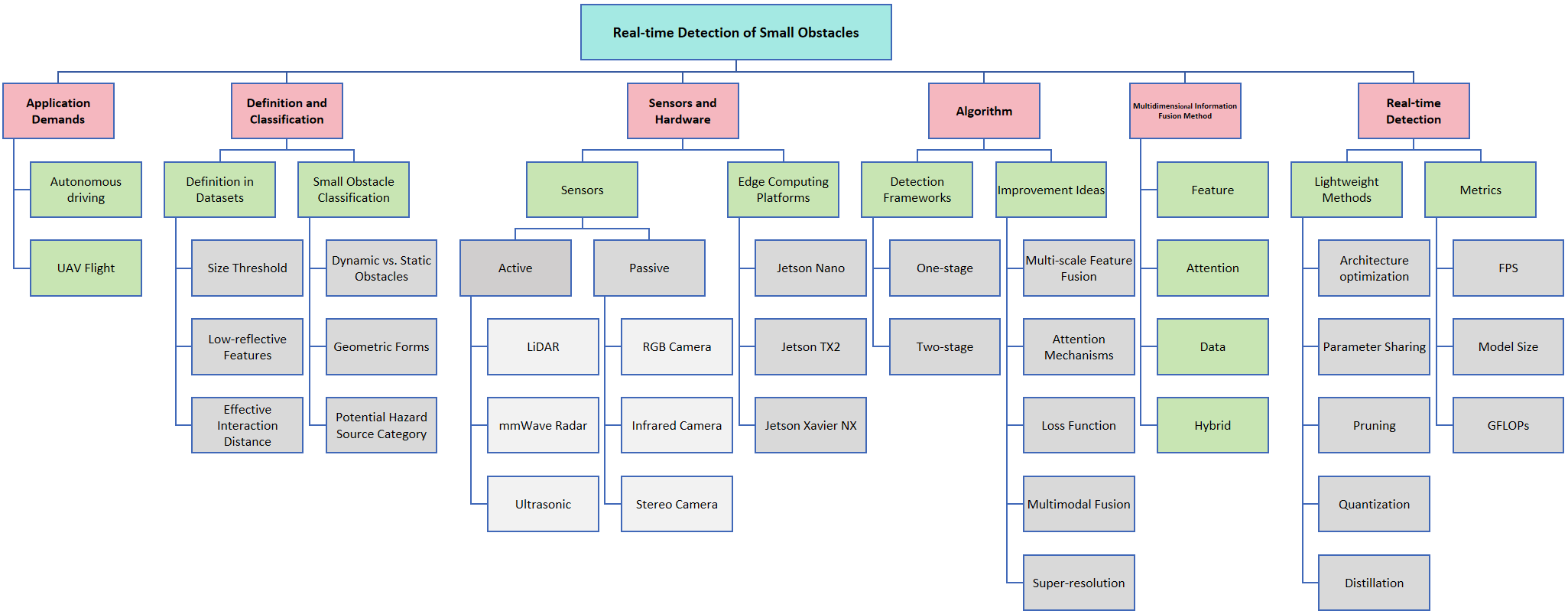
Real-time detection of small obstacles is a critical challenge for autonomous systems such as self-driving vehicles, unmanned aerial vehicles (UAVs), and mobile robots. These small obstacles (e.g., road debris, fallen branches, cables) pose significant safety risks due to their low visibility and irregular appearances. This paper presents a comprehensive systematic review of 117 technical articles published between 2016 and 2025, focusing on the techniques and deployment strategies for real-time small obstacle detection using fused multidimensional information. We summarize and analyze developments in small obstacle definitions, sensing hardware, detection algorithms, fusion methods, and real-time optimization techniques. Our findings reveal a growing trend toward integrating multiscale learning, multimodal fusion, and lightweight models for deployment in resource-constrained environments. However, challenges such as performance consistency across platforms, lack of standard definitions, and insufficient deployment practices persist. This review identifies future research opportunities and provides recommendations to guide further advances in robust, scalable, and deployable small obstacle detection systems.
Keywords
small obstacle detection
real-time detection
multidimensional information
multimodal fusion
lightweight models
Data Availability Statement
Not applicable.
Funding
This work was supported by the Project of Shenzhen Science and Technology Plan under Grant KJZD20230923114405012 and Guangdong Provincial Key Laboratory under Grant 2023B1212060076.
Conflicts of Interest
Yong Zhang is an employee of Guangdong Provincial Key Laboratory of Intelligent Information Processing, Shenzhen 518060, China, Junyan Cai is an employee of Dongguan New-Generation Artificial Intelligence Industry Technology Research Institute, Dongguan 523000, China. The authors declare no conflicts of interest.
Ethical Approval and Consent to Participate
Not applicable.
Cite This Article
APA Style
Zhang, Y., Qian, Z., & Cai, J. (2025). A Systematic Review on Real-time Detection of Small Obstacles Based on Multidimensional Information Fusion. Chinese Journal of Information Fusion, 2(4), 313–339. https://doi.org/10.62762/CJIF.2025.500710
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and Permissions

Copyright © 2025 by the Author(s). Published by Institute of Central Computation and Knowledge. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (
https://creativecommons.org/licenses/by/4.0/), which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.

 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue