Abstract
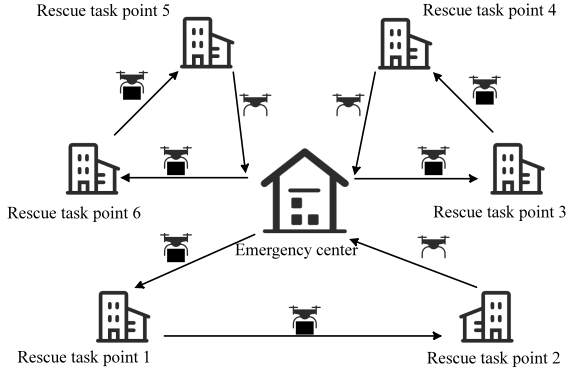
To address the issues of low solving efficiency and susceptibility to local optima in multi-unmanned aerial vehicle (multi-UAV) task allocation algorithms within urban areas, this study constructs a task allocation model aiming to minimize economic costs for material delivery and reduce the urgency of rescue task demands. A multi-strategy clustering ant colony optimization algorithm (KMACO) is proposed for solution. Specifically, the K-means clustering method is utilized to partition the number of rescue tasks assigned to each UAV. In the ant colony optimization algorithm, a pheromone update strategy and a random evolution strategy are introduced to guide population search directions, thereby enhancing solving efficiency and avoiding local optima. Experimental results demonstrate that the proposed algorithm effectively reduces algorithm running time and operational economic costs while satisfying rescue task urgency requirements. Compared with conventional methods, KMACO shows superior performance in convergence speed and solution quality, thus providing an optimized decision-making framework for emergency rescue operations in complex urban environments.
Data Availability Statement
Data will be made available on request.
Funding
This work was supported by Key Research and Development Program of Tianjin, China of funding agency under 22YFZCSN00210.
Conflicts of Interest
The authors declare no conflicts of interest.
Ethical Approval and Consent to Participate
Not applicable.
Cite This Article
APA Style
Wang, R., Shan, Y., Sun, L., & Sun, H. (2025). Multi-UAV Cooperative Task Allocation Based on Multi-strategy Clustering Ant Colony Optimization Algorithm. ICCK Transactions on Intelligent Systematics, 2(3), 149–159. https://doi.org/10.62762/TIS.2025.409447
Publisher's Note
ICCK stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Central Computation and Knowledge (ICCK) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.


 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue